Costruisci e programma il tuo cane robot con SunFounder PiDog
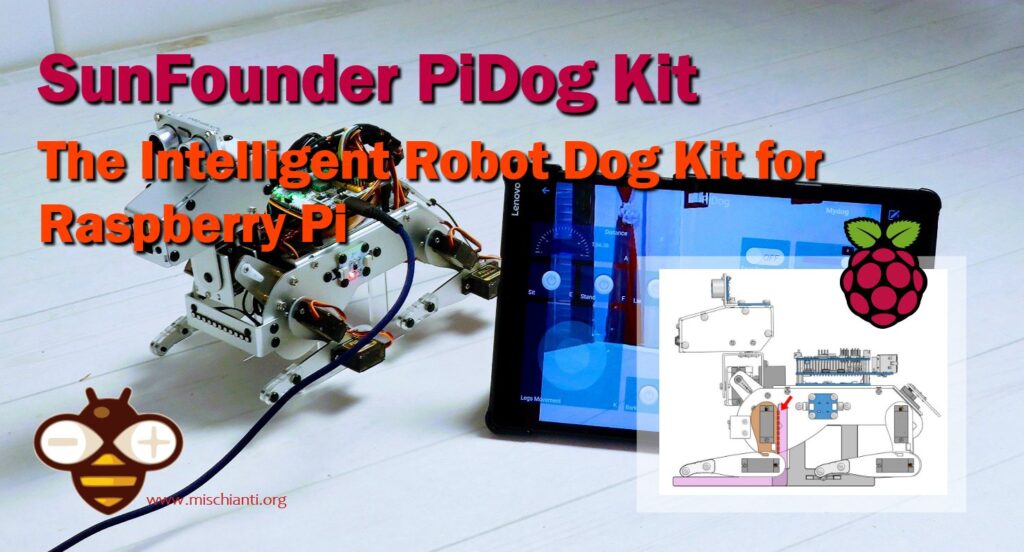
Il SunFounder PiDog Robot Dog Kit è un kit di robotica avanzato progettato per gli appassionati di Raspberry Pi e per gli educatori. Questo kit consente agli utenti di costruire un cane robot in grado di eseguire movimenti realistici simili a quelli di un cane, grazie al suo completo set di sensori e servocomandi.
Puoi trovarlo da: SunFounder
Cos’è il SunFounder PiDog?
Il PiDog è un animale domestico robotico che costruisci in poche ore. Con un telaio in alluminio, diversi sensori e dodici servocomandi, è in grado di imitare le azioni e i comportamenti di un cane reale. Il PiDog può sedersi, stare in piedi, camminare, trottare, abbaiare, ululare, reagire ai volti, evitare ostacoli e obbedire ai comandi vocali, offrendo un progetto altamente interattivo e coinvolgente.
Specifiche Tecniche
- Dimensioni dopo l’assemblaggio: 24 cm di lunghezza x 22,5 cm di altezza x 14 cm di larghezza
- Schede madri compatibili: Raspberry Pi 4, 3B+, 3B, Zero 2 W
- Scheda di espansione: SunFounder Robot Hat
- Fotocamera: Fotocamera da 5MP
- Sensori: Modulo Ultrasonico, Modulo Interruttore a Tocco, Sensore 6 DOF (Giroscopio + Accelerometro), Modulo di Direzione del Suono
- Modalità di Connessione: WiFi/ AP
- Materiale del Corpo: Lega di Alluminio
- Numero di Servocomandi: 12
- Set di Azioni: Camminare, dormire, sedersi, correre, girare a sinistra, girare a destra, grattarsi le orecchie, muovere la testa, scodinzolare, stirarsi, fare flessioni
- Comandi Vocali: Avanti, indietro, gira a sinistra, gira a destra, trotta, fermati, sdraiati, alzati, siediti, abbaia, abbaia più forte, ansima, scodinzola, scuoti la testa, stirati, addormentati, fai flessioni, ulula, torci il corpo, grattati, dai la zampa, dammi il cinque
- Utilizzo delle Strisce LED RGB: Espressione Emotiva

- Tipo di Batteria: 2 x Batteria 18650
- Durata della Batteria: 1,5 ore
- Tempo di Ricarica: Circa 2-3 ore
- Modalità di Controllo: App Controller SunFounder
- Linguaggio di Programmazione: Python
Hardware
Il componente principale del PiDog sono le schede di controllo e i sensori.
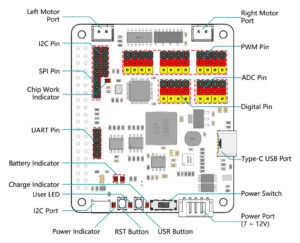
RoboHAT
Il Robot HAT è una scheda di espansione versatile che trasforma un Raspberry Pi in un robot funzionale. Presenta un MCU integrato per estendere le capacità di output PWM e input ADC del Raspberry Pi. Inoltre, include un chip driver per motori, un modulo audio I2S e un altoparlante mono, insieme ai GPIO del Raspberry Pi.
Caratteristiche Principali
- Altoparlante: Riproduce musica di sottofondo, effetti sonori e supporta funzioni TTS per migliorare il tuo progetto.
- Ingresso di Alimentazione: Accetta un ingresso di alimentazione PH2.0 a 5 pin da 7-12V. Dotato di 2 indicatori di batteria, 1 indicatore di carica e 1 indicatore di alimentazione.
- LED e Pulsante Facili da Usare: Include un LED e un pulsante per test rapidi degli effetti.
Componenti Dettagliati
- Presa di Alimentazione: Ingresso PH2.0 a 3 pin da 7-12V, che consente l’alimentazione simultanea del Raspberry Pi e del Robot HAT.
- Interruttore di Alimentazione: Controlla l’alimentazione del Robot HAT. Il Raspberry Pi si avvia al collegamento dell’alimentazione, ma il HAT richiede l’accensione dell’interruttore.
- Presa USB Type-C: Utilizzata per ricaricare la batteria. L’indicatore di carica si accende in rosso durante la carica e si spegne quando è completamente carica. Dopo 4 ore di carica completa, l’indicatore lampeggia.
- Pins Digitali: 4 canali di pins digitali (D0-D3).
- Pins ADC: 4 canali di pins ADC (A0-A3).
- Pins PWM: 12 canali di pins PWM (P0-P11).
- Porte per Motori: 2 canali di porte motori XH2.54 collegate a GPIO 4 e GPIO 5.
- Pin e Porta I2C: Interfaccia a 4 pin P2.54 e interfaccia SH1.0 a 4 pin compatibili con QWIIC e STEMMA QT, collegata tramite GPIO2 (SDA) e GPIO3 (SCL).
- Pin SPI: Interfaccia SPI a 7 pin P2.54.
- Pin UART: Interfaccia a 4 pin P2.54.
- Pulsante RST: Riavvia il programma Ezblock se utilizzato, altrimenti personalizzabile.
- Pulsante USR: Pulsante programmabile (pressione = input “0”, rilascio = input “1”).
- Indicatore di Batteria: Due LED indicano una tensione superiore a 7,6V, un LED per 7,15V a 7,6V, e entrambi spenti sotto i 7,15V.
- Altoparlante e Porta: Altoparlante a camera audio 2030 con uscita audio I2S integrata per suono mono.
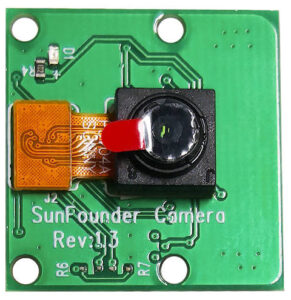
Panoramica del Modulo Fotocamera Raspberry Pi da 5MP
Questo modulo fotocamera è dotato di un sensore OV5647 ed è progettato per Raspberry Pi, offrendo un’esperienza plug-and-play tramite la porta CSI (Camera Serial Interface). La scheda compatta misura 25mm x 23mm x 9mm e pesa solo 3 grammi, rendendola perfetta per progetti mobili o dove lo spazio è limitato.
Specifiche Chiave
- Risoluzione: 5MP, catturando immagini fisse a 2592 x 1944 pixel.
- Supporto Video: 1080p a 30 fps, 720p a 60 fps e 640 x 480 a 60/90 fps.
- Apertura: F1.8
- Angolo di Visione: 65 gradi
- Dimensioni: 24mm x 23,5mm x 8mm
- Peso: 3 grammi
- Interfaccia: Connettore CSI
- Compatibilità: Supporta Raspberry Pi OS
Panoramica del Sensore di Direzione del Suono
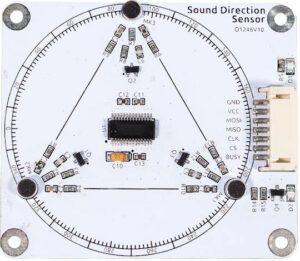
Il modulo di riconoscimento della direzione del suono è dotato di tre microfoni e di un processore TR16F064B, che rileva e calcola la direzione delle sorgenti sonore da tutte le direzioni. Offre un raggio di rilevamento di 360 gradi con un’unità minima di riconoscimento di 20 gradi e una precisione angolare di circa 10 gradi.
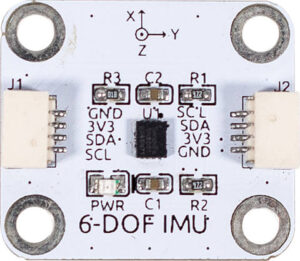
Panoramica del IMU a 6 DOF
L’IMU a 6 DOF è basato sul sensore SH3001, che integra un giroscopio a tre assi e un accelerometro a tre assi. Questa piccola unità a basso consumo energetico è progettata per fornire dati di velocità angolare e accelerazione lineare ad alta precisione in tempo reale. È adatta per vari dispositivi elettronici di consumo, inclusi smartphone, tablet, droni, dispositivi AR/VR e indossabili intelligenti.
Panoramica del Doppio Sensore Tattile
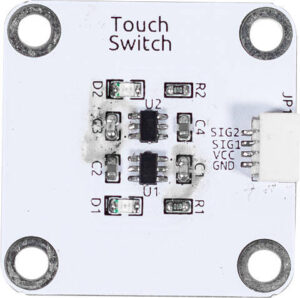
Il Doppio Sensore Tattile è basato su due IC sensori tattili TTP223. Rileva i segnali tattili, abbassando il livello del pin corrispondente quando attivato. Il TTP223 è progettato per sostituire i tasti tradizionali, offrendo un basso consumo energetico e un’ampia tensione operativa.
Panoramica della Scheda Luminosa a 11 Canali
Il modulo LED RGB a 11 canali, controllato dal chip SLED1735, presenta 11 LED RGB. L’SLED1735 può pilotare fino a 256 LED e 75 LED RGB, offrendo varie funzionalità come accensione/spegnimento, lampeggio, luce respiratoria e sincronizzazione automatica. Include la tecnologia PWM integrata per 256 livelli di regolazione della luminosità e una funzione di correzione dei punti a 16 livelli.
Panoramica del Modulo Ultrasonico
Il sensore di distanza ultrasonico HC-SR04 fornisce una misurazione senza contatto da 2 cm a 400 cm con una precisione fino a 3 mm. Include un trasmettitore ultrasonico, un ricevitore e un circuito di controllo. Il modulo opera inviando una raffica di ultrasuoni di 8 cicli a 40 kHz e misurando il tempo necessario per il ritorno dell’eco, consentendo il calcolo della distanza.
Panoramica della Batteria 18650
Il pacco batteria personalizzato di SunFounder è composto da due batterie 18650, ciascuna con una capacità di 2000mAh. Progettato per l’uso con il Robot HAT, il pacco include caratteristiche per migliorare le prestazioni e la protezione.
Unboxing e processo di assemblaggio
Assemblare il SunFounder PiDog Robot Dog Kit è un compito che trova un equilibrio tra semplicità e complessità. Sebbene il processo non sia eccessivamente complicato, richiede un’attenzione accurata ai dettagli e un livello base di competenze tecniche per seguire correttamente le istruzioni. Pensatelo come costruire un set Lego complesso, in cui ogni passo è cruciale per la struttura e la funzionalità complessive del prodotto finale.
In questa guida troverete istruzioni passo-passo progettate per guidarvi attraverso il processo di assemblaggio. Prestando molta attenzione e prendendovi il tempo necessario per ogni passo, vi assicurerete che ogni componente sia correttamente posizionato e collegato, risultando in un cane robot pienamente funzionale e reattivo. Che siate principianti o abbiate già esperienza con progetti simili, questa guida vi aiuterà a navigare nell’assemblaggio con sicurezza.
Iniziamo questo emozionante viaggio per dare vita al vostro PiDog, assicurando un’esperienza gratificante ed educativa.
La scatola
Nella foto, il SunFounder PiDog Robot Dog Kit è presentato nella sua confezione iniziale, mostrando una scatola compatta e ben organizzata. La scatola stessa è progettata per essere efficiente in termini di spazio, assicurando che tutti i componenti siano imballati in modo sicuro, riducendo al minimo l’ingombro complessivo. Questa compattezza non solo rende il kit facile da conservare e trasportare, ma riflette anche il design accurato e l’attenzione ai dettagli che SunFounder ha messo nel creare un prodotto facile da usare. I componenti disposti ordinatamente all’interno promettono un processo di assemblaggio ben strutturato e diretto, preparando il terreno per una costruzione entusiasmante.
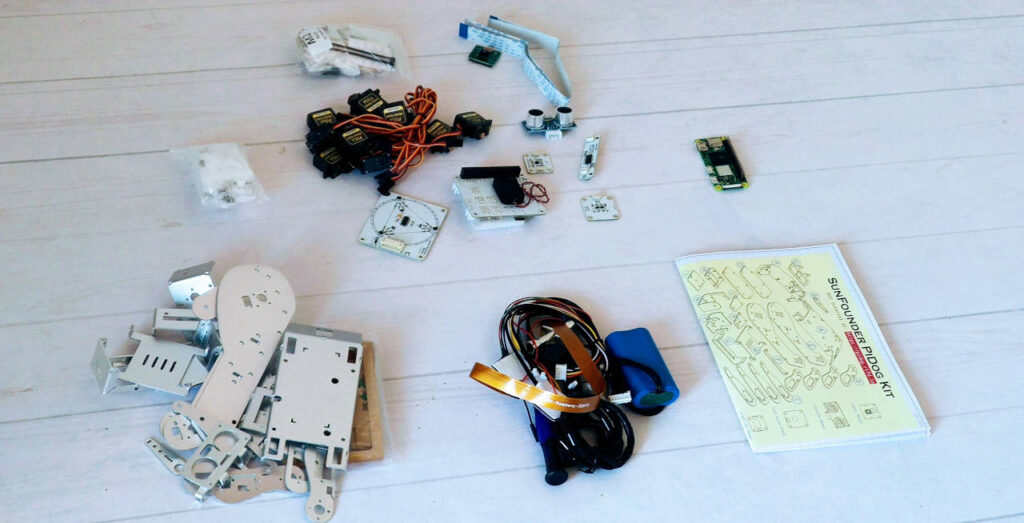
In questa foto, tutti i componenti del SunFounder PiDog Robot Dog Kit sono meticolosamente disposti sul tavolo, creando un’impressionante esposizione di ciò che è incluso nel kit. Ogni pezzo, dalle parti del telaio in alluminio ai vari sensori e servocomandi, è chiaramente visibile e organizzato. La vibrante gamma di componenti lascia intuire il complesso processo di assemblaggio che ci attende.
Questa disposizione ben organizzata non solo mette in mostra la natura completa del kit, ma evidenzia anche l’attenzione ai dettagli che SunFounder ha messo nell’assicurare che ogni parte sia facilmente identificabile e accessibile. L’assortimento di parti – che va dai 12 servocomandi a ingranaggi metallici ai 13 pezzi in plexiglass trasparente – riflette la precisione e la qualità dei materiali utilizzati.
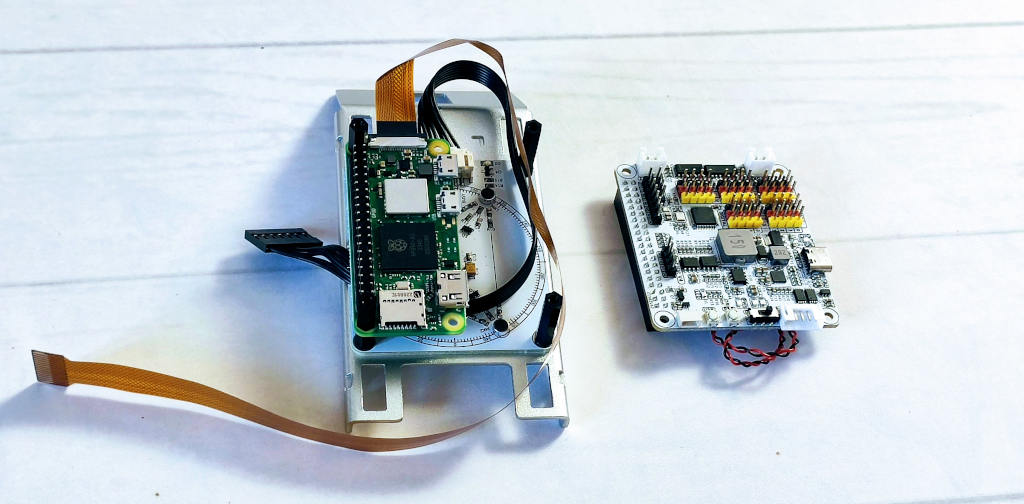
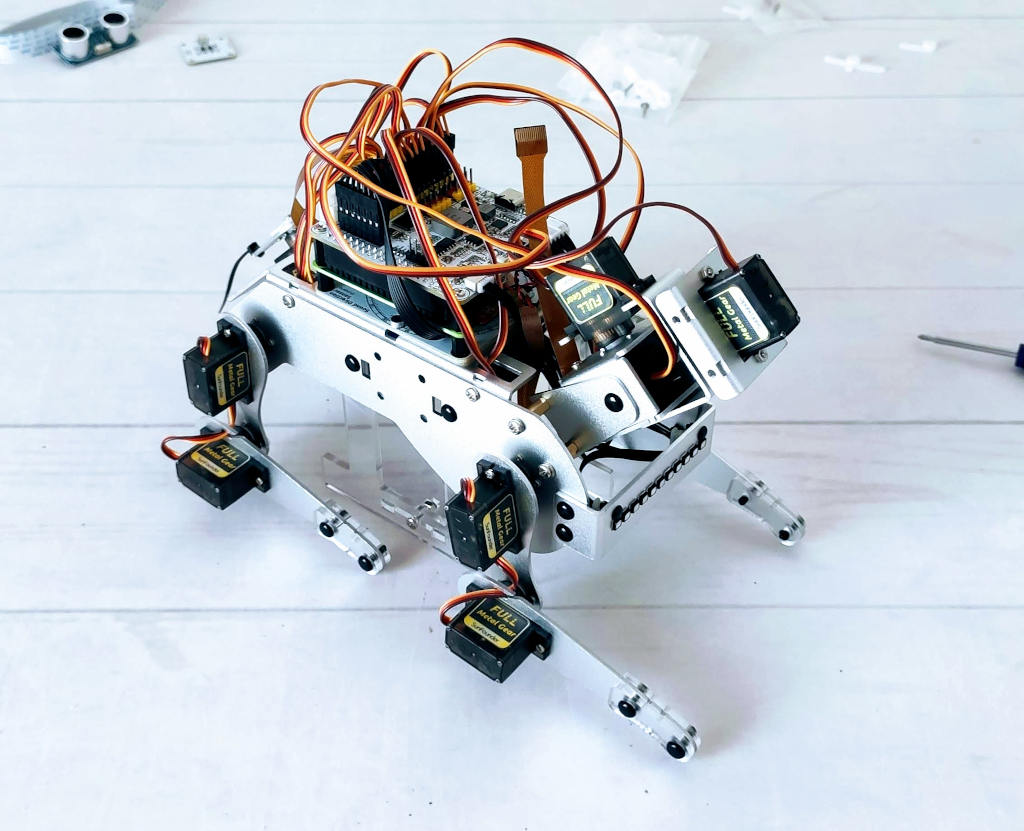
In questa foto, potete vedere i primi passi cruciali del processo di assemblaggio che stanno prendendo forma. Il telaio principale, spesso chiamato “la schiena”, è assemblato con il Raspberry Pi Zero 2 W montato saldamente. La struttura in alluminio elegante della schiena fornisce una base robusta per il cane robot, mostrando l’ingegneria di precisione dietro il kit.
L’elettronica (RobotHAT)
Adiacente alla schiena e al Raspberry Pi Zero 2 W si trova il Robot HAT, posizionato nelle vicinanze e pronto per essere integrato. Il Robot HAT è progettato per estendere le funzionalità del Raspberry Pi, fornendo porte aggiuntive e connessioni essenziali per il funzionamento del robot. La sua vicinanza nella foto evidenzia il prossimo passo nel processo di assemblaggio, in cui verrà collegato al Raspberry Pi e connesso a vari componenti.
In questa foto laterale, si può vedere l’assemblaggio progredire splendidamente con il Robot HAT ora saldamente installato sul Raspberry Pi Zero 2 W. Il Robot HAT si adagia perfettamente sulla spina dorsale, aggiungendo un tocco di sofisticazione e funzionalità all’insieme. La sua gamma di porte e connettori è chiaramente visibile, pronta per interfacciarsi con i vari sensori e motori che daranno vita al PiDog.
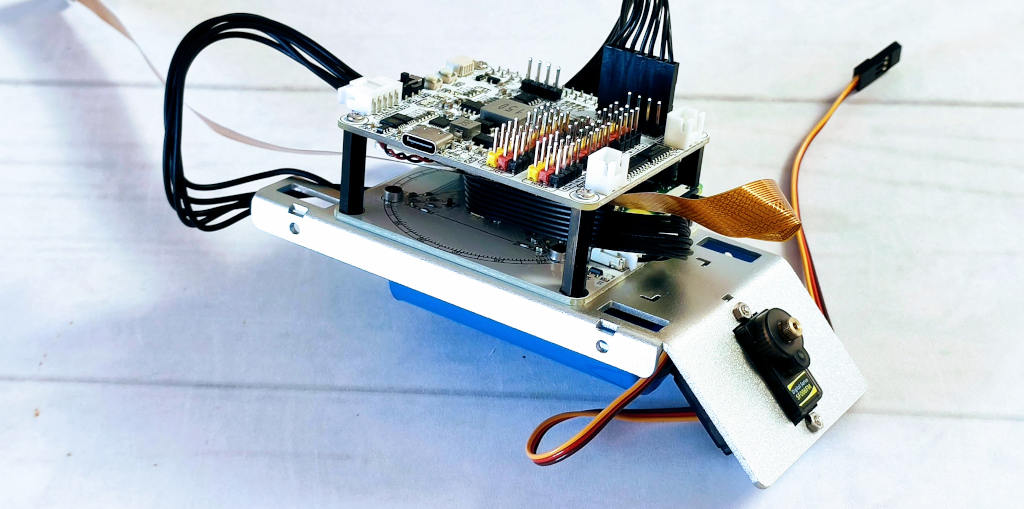
In questa foto, possiamo vedere chiaramente il lato inferiore del SunFounder PiDog, evidenziando il posizionamento della batteria. Il compatto pacco batteria 18650 è saldamente fissato con una fascia in velcro, assicurando che rimanga al suo posto durante i movimenti del robot. Il posizionamento accurato della batteria dimostra un design attento, bilanciando il peso per mantenere stabilità e prestazioni.
Il pacco batteria si collega al Robot HAT tramite un connettore PH2.0-5P, visibile da questa angolazione. Questa connessione garantisce un’alimentazione stabile a tutti i componenti, facilitando il funzionamento senza interruzioni del robot. La fascia in velcro offre un facile accesso per la ricarica e la manutenzione, mantenendo la batteria saldamente fissata.
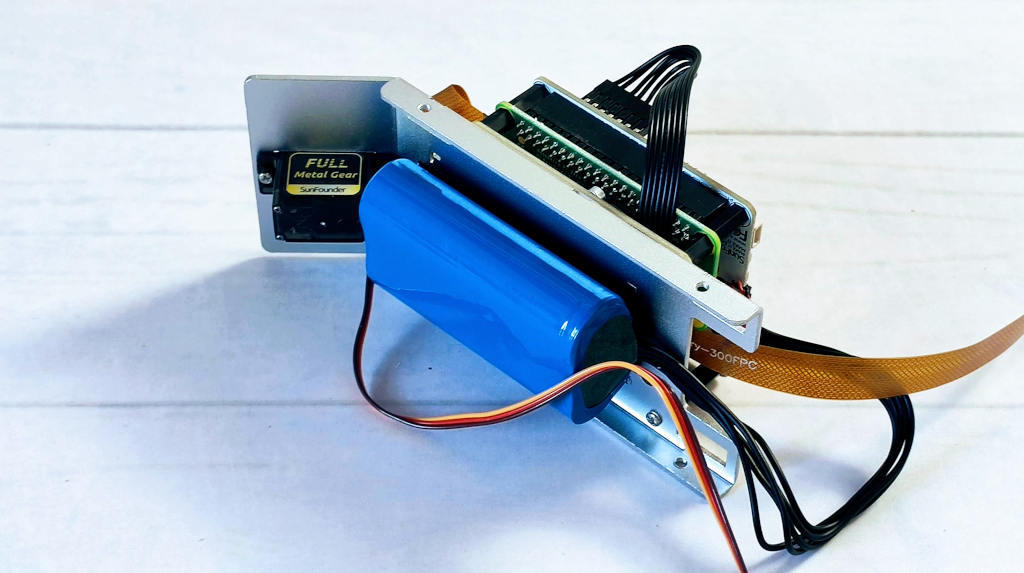
Questa foto ravvicinata mostra l’assemblaggio dettagliato della coda del PiDog. La coda, costruita con parti in alluminio resistenti, è collegata a un servomotore che le consente di muoversi con precisione. Il servomotore è saldamente montato sulla struttura, garantendo movimenti della coda stabili e reattivi.
Corpo
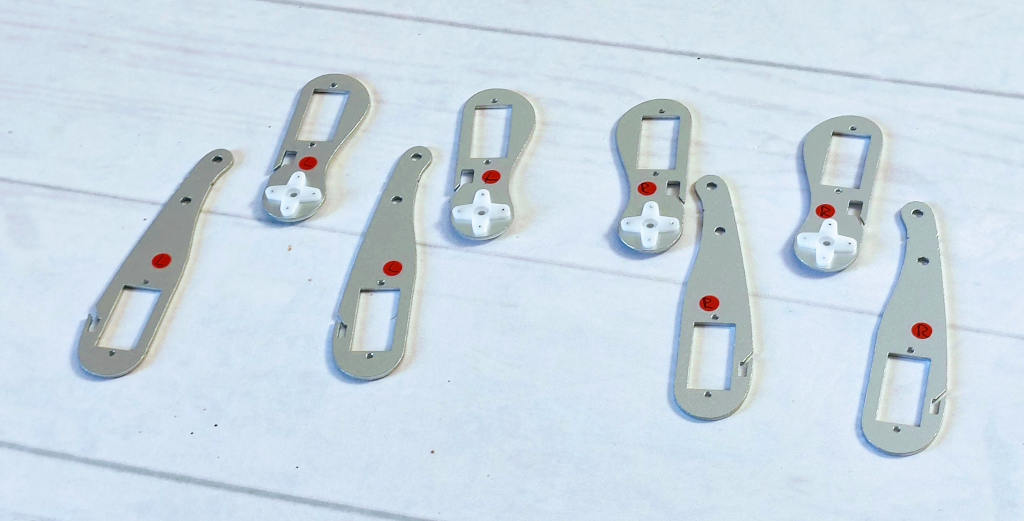
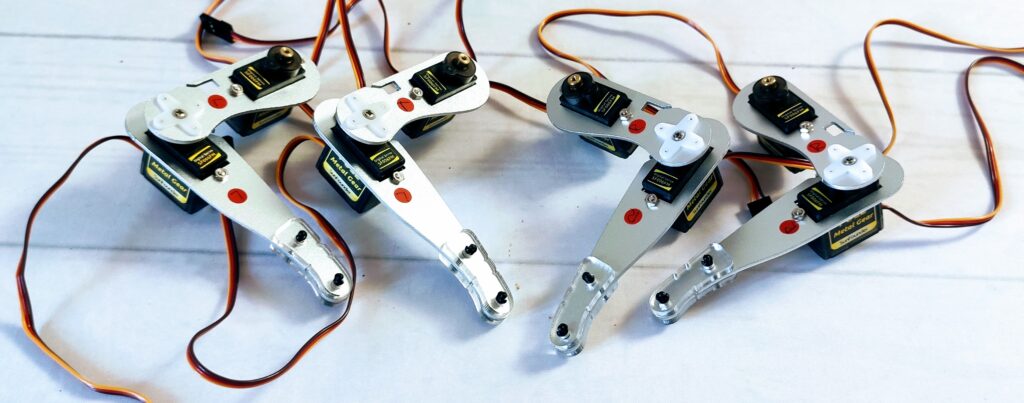
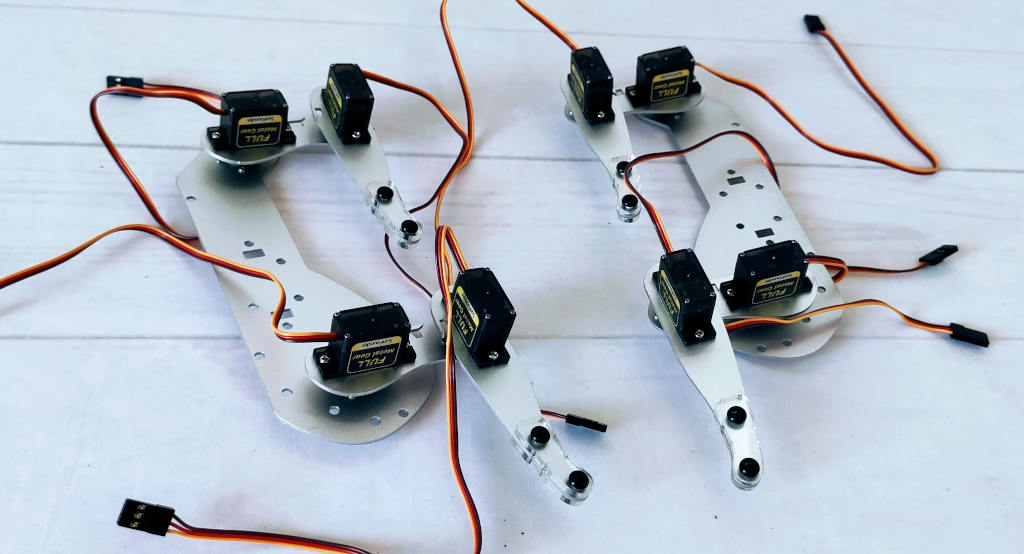
In questa foto dettagliata, sono evidenziate le parti in alluminio delle gambe del PiDog. I componenti in alluminio eleganti e resistenti sono meticolosamente assemblati, fornendo una struttura forte e stabile per i movimenti del robot. Ogni segmento è tagliato e adattato con precisione, garantendo un’articolazione fluida e accurata.
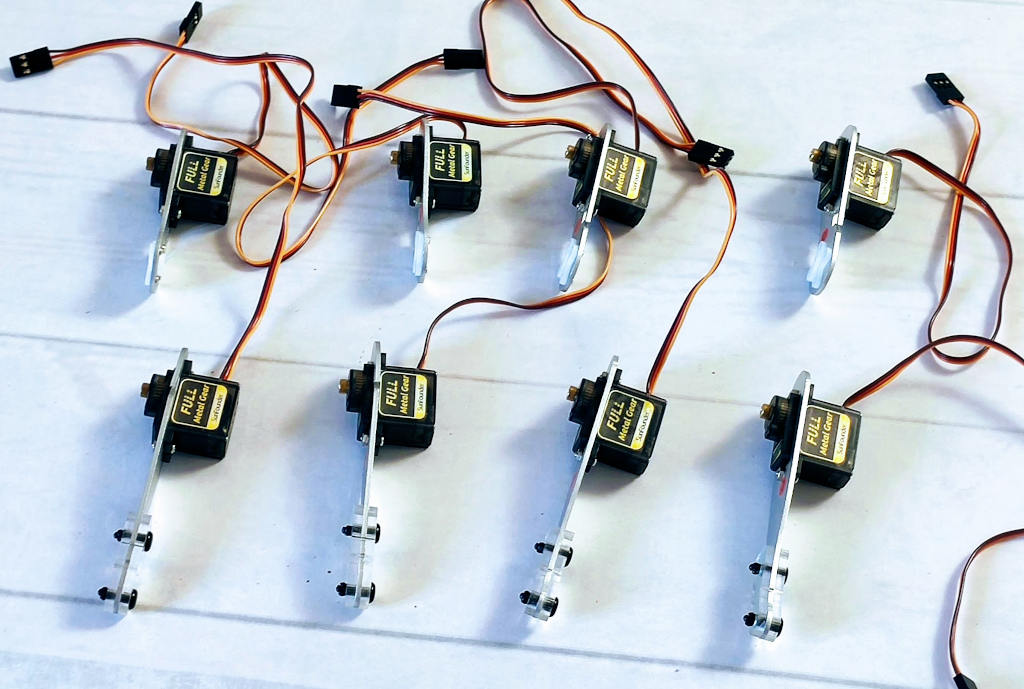
Questa foto dettaglia l’assemblaggio delle gambe del PiDog, evidenziando i servomotori saldamente attaccati. La robusta struttura in alluminio supporta i servomotori, garantendo movimenti robusti e precisi. I servomotori sono montati nei punti chiave, fornendo l’articolazione necessaria per azioni dinamiche.
In questa foto, la gamba del PiDog è completamente assemblata, mostrando l’integrazione completa delle parti in alluminio e dei servomotori. La robusta struttura in alluminio fornisce forza e stabilità, mentre i servomotori sono posizionati con precisione in ogni giuntura, consentendo una gamma di movimenti articolati.
In questa foto, le gambe del PiDog sono ora collegate al telaio principale del corpo. L’integrazione delle gambe nella struttura del corpo è pulita e precisa, evidenziando il design robusto e garantendo stabilità. I servomotori sono ben posizionati per consentire movimenti efficienti e fluidi, portando il PiDog più vicino alla piena mobilità.
In questa foto, il corpo del PiDog è ora completo con tutte e quattro le gambe attaccate. L’integrazione è elegante e precisa, evidenziando la costruzione robusta e il design accurato.
Testa
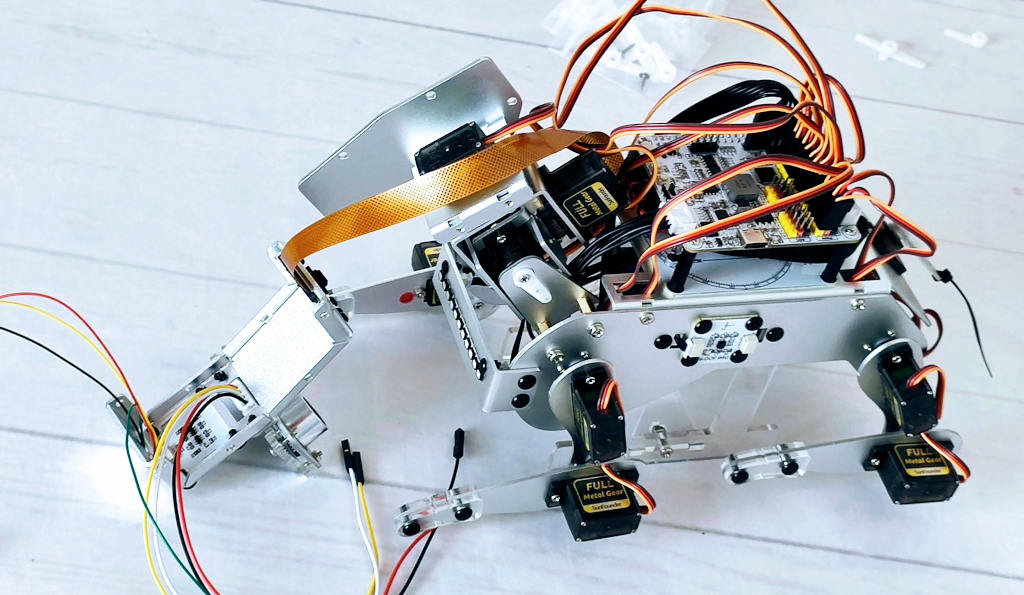
Questa foto cattura l’assemblaggio dettagliato del collo del PiDog. La struttura del collo, realizzata con materiali resistenti, è accuratamente integrata con servomotori per consentire movimenti della testa fluidi e precisi.
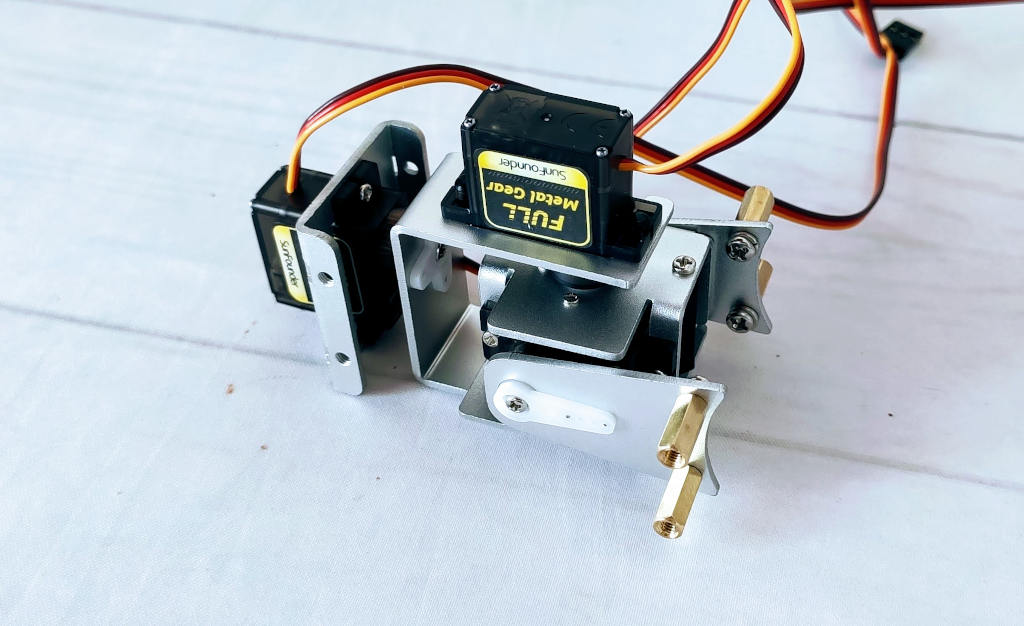
Questa foto mostra il collo del PiDog saldamente collegato al corpo principale. L’attacco è preciso, garantendo un supporto affidabile per i movimenti della testa.
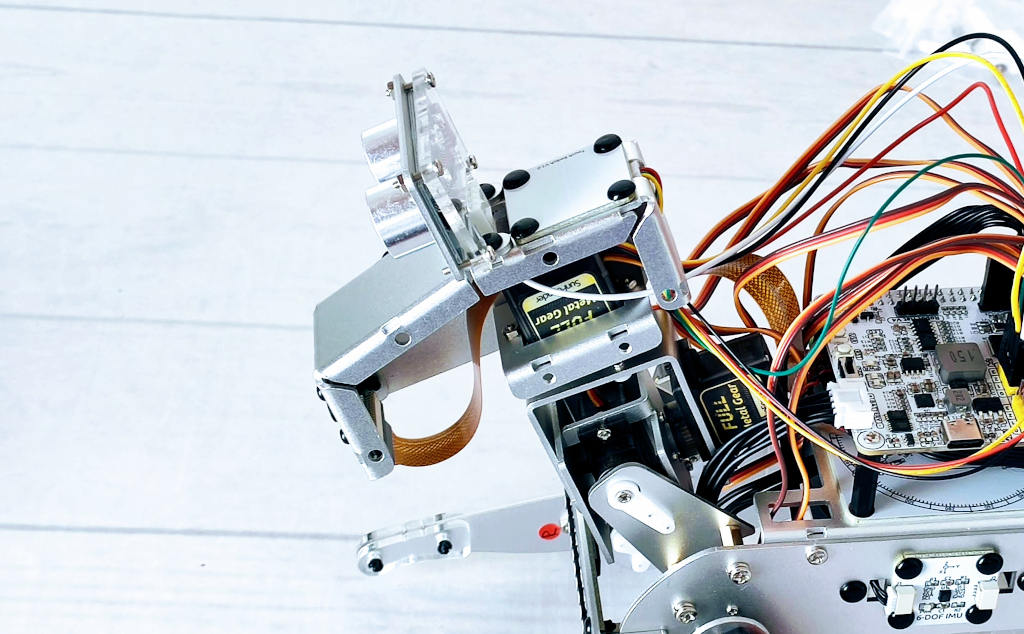
Questa foto mostra i primi pezzi della testa del PiDog che si uniscono.
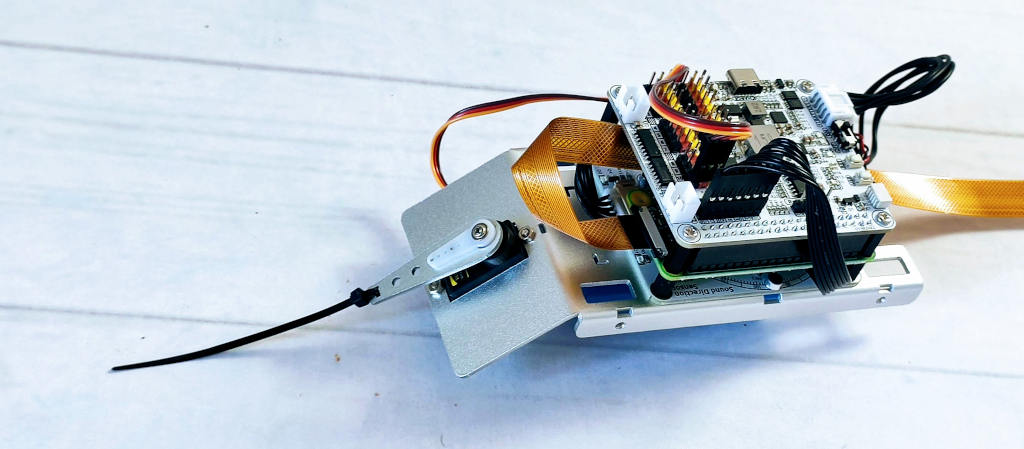
Questa foto evidenzia la testa del PiDog quasi completata. La maggior parte dei componenti, inclusi il telaio in alluminio, il modulo fotocamera e i vari sensori, sono ora in posizione.
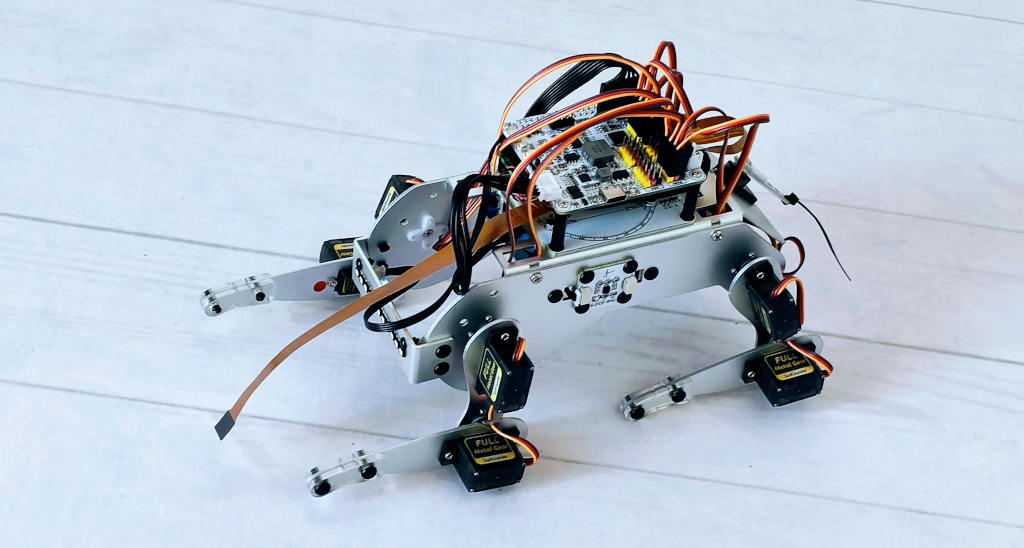
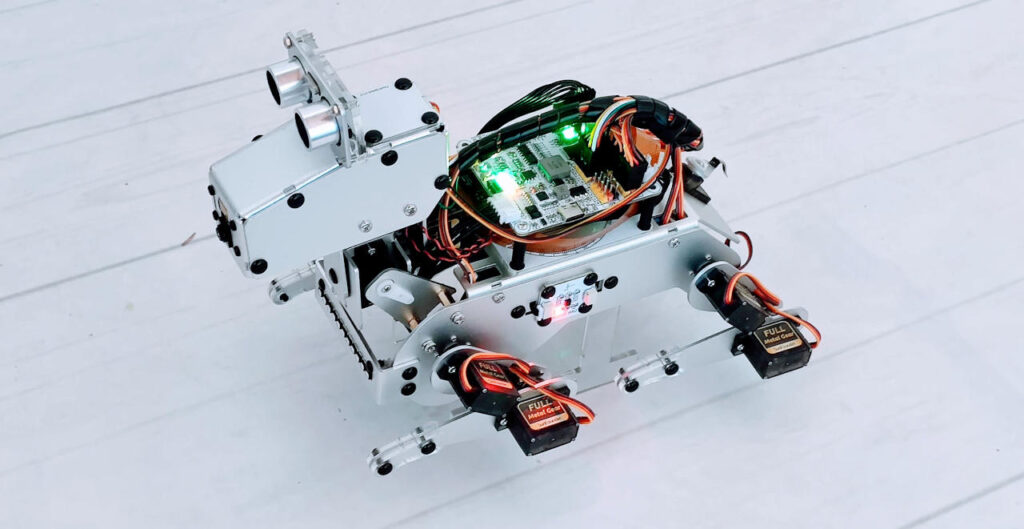
E infine il nostro PiDog assemblato.
Installazione del software e configurazione delle periferiche
Come di consueto, consiglio di utilizzare Raspberry Pi Imager per l’installazione, io seleziono Raspberry Pi OS (64-bit) e lo metto su una SD.
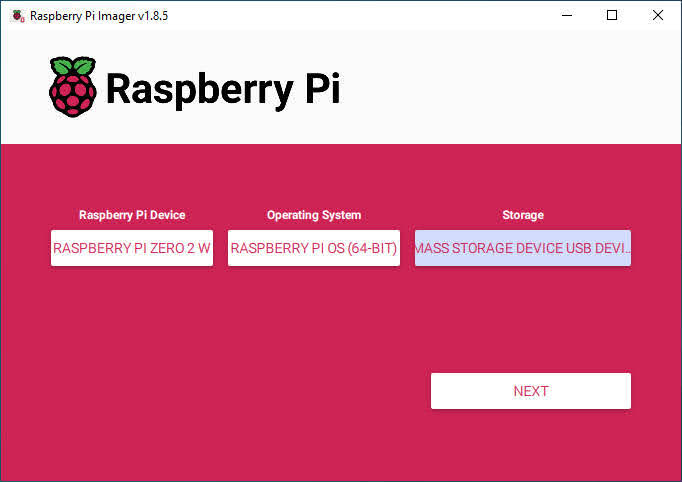
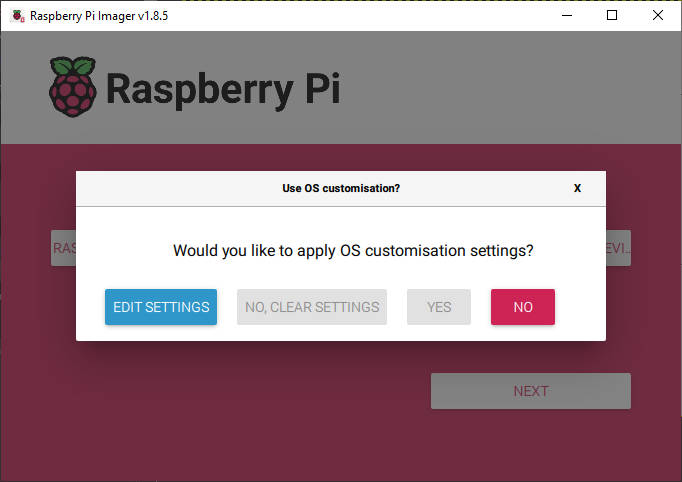
Ora inseritela nello slot posteriore per la scheda SD e avviate il dispositivo. Alla pressione del pulsante NEXT, il programma richiederà le impostazioni, selezionate EDIT SETTINGS.
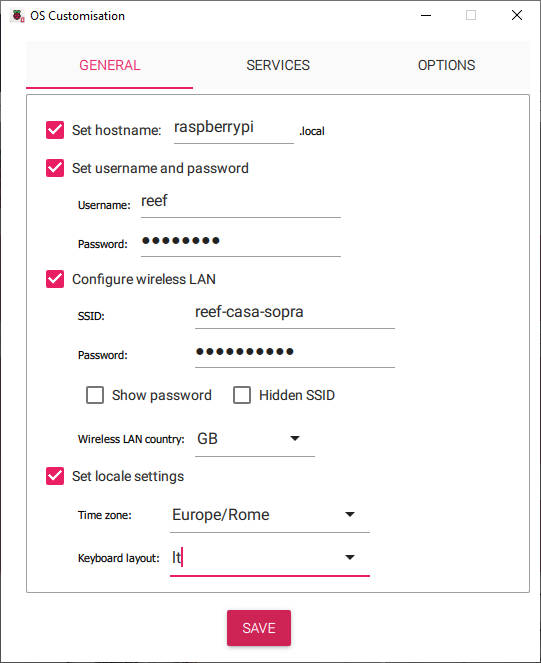
E aggiungete tutte le informazioni necessarie per connettersi da programmi esterni (se non avete collegato l’HDMI).
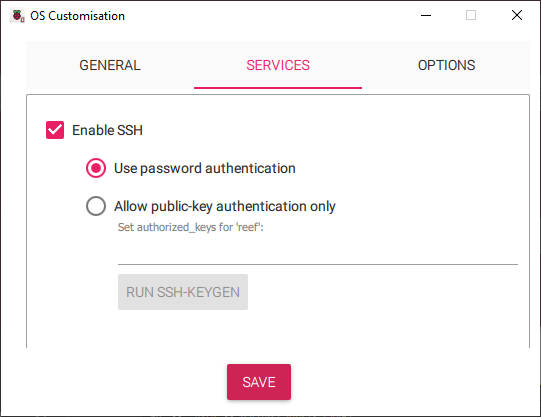
Importante il servizio SSH che consente di utilizzare programmi come Putty o Bitvise SSH
Dopo di ciò, installate la scheda SD nel Raspberry PiDog e sul dispositivo.
Se non potete collegare uno schermo, usate un programma per trovare il dispositivo (o controllate sul vostro router) e connettetevi tramite SSH.
Installare tutti i moduli
- Assicurati di essere connesso a Internet e aggiorna il tuo sistema:
sudo apt update
sudo apt upgrade
sudo apt install git python3-pip python3-setuptools python3-smbus
- Installa il modulo
robot-hat.
cd ~/
git clone -b v2.0 https://github.com/sunfounder/robot-hat.git
cd robot-hat
sudo python3 setup.py install
- Installa il modulo
vilib.
cd ~/
git clone -b picamera2 https://github.com/sunfounder/vilib.git
cd vilib
sudo python3 install.py
- Scarica il codice.
cd ~/
git clone https://github.com/sunfounder/pidog.git
- Installa il modulo
pidog.
cd pidog
sudo python3 setup.py install
- Esegui lo script
i2samp.sh.
Infine, è necessario eseguire lo scripti2samp.shper installare i componenti richiesti dall’amplificatore i2s, altrimenti il robot non avrà suono.
cd ~/pidog
sudo bash i2samp.sh
Regolazione dei Servomotori
SunFounder consiglia di impostare tutti gli angoli dei servomotori a 0° prima dell’assemblaggio. Questo passaggio è cruciale poiché le impostazioni di fabbrica per gli angoli dei servomotori sono casuali e possono variare da 0° a 45°. Assemblare i servomotori senza azzerarli può portare a movimenti erratici o, peggio, causare il blocco e il surriscaldamento dei servomotori.
Ecco il processo consigliato da SunFounder:
- Imposta il Servomotore a 0°:
- Inserisci il braccio del servomotore nell’albero del servomotore.
- Ruota delicatamente il braccio del servomotore a diverse angolazioni per assicurarti che sia libero di muoversi.
- Esegui lo Script di Azzeramento:
- Esegui
servo_zeroing.pyche si trova nella cartellaexamples/. - Se si verifica un errore, riattiva la porta I2C del Raspberry Pi.
- Esegui
cd ~/pidog/examples
sudo python3 servo_zeroing.py
- Collega alla Porta P11:
- Collega il cavo del servomotore alla porta P11.
- Il braccio del servomotore ruoterà fino alla posizione di 0° (posizione casuale, potrebbe non essere verticale o parallela).
- Fissa il Braccio del Servomotore:
- Rimuovi il braccio del servomotore senza scollegare il cavo del servomotore e senza spegnere l’alimentazione.
- Rimetti il braccio del servomotore e fissalo con una vite prima di scollegare il cavo.
SunFounder consiglia di eseguire questo passaggio durante il processo di assemblaggio. Tuttavia, ho preferito completarlo alla fine, quando tutti i servomotori erano collegati, consentendomi di gestirlo in un’unica fase consolidata. Questo approccio ha semplificato il processo, assicurando che tutti i servomotori fossero correttamente allineati e collegati prima di finalizzare questo passaggio cruciale. Facendo tutto in una volta, ho potuto verificare l’integrità e la funzionalità dell’intero sistema, assicurandomi che ogni componente funzionasse armoniosamente come parte dell’assemblaggio completo.
Nota: Non ruotare il servomotore mentre è alimentato per evitare danni. Se l’albero del servomotore non è inserito correttamente, rimuovilo e reinseriscilo. Assicurati di impostare ogni angolo del servomotore a 0° prima dell’assemblaggio finale.
Calibrare il PiDog¶
Calibrare il tuo PiDog è un passaggio essenziale per garantirne il funzionamento stabile ed efficiente.
Metti il PiDog sulla base e posiziona la gamba come nella foto.
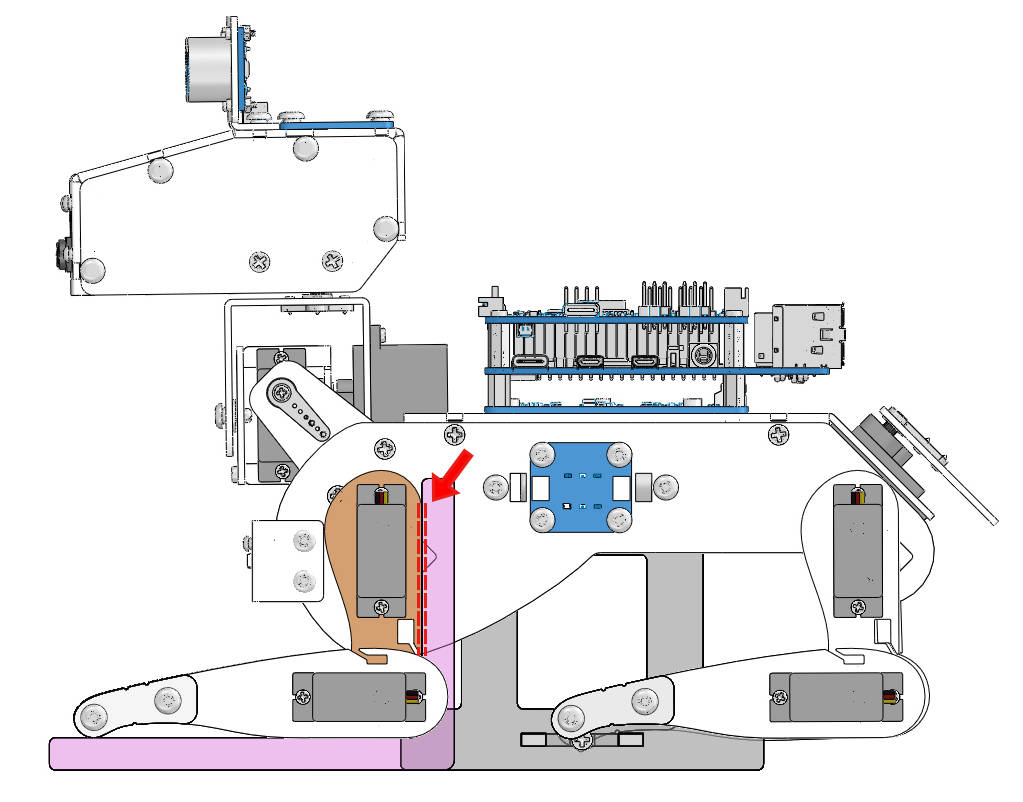
E avvia il programma di calibrazione.
cd ~/pidog/examples
sudo python3 0_calibration.py
Come iniziare con PiDog
SunFounder è molto impegnata nella formazione e nei tutorial software, e offrire una serie di esempi pronti all’uso è molto importante per imparare a utilizzare il dispositivo.
Progetti in Python¶
Possiamo esplorare una varietà di progetti che mettono in evidenza la versatilità e le capacità di questo innovativo robot. Dal configurare una routine di risveglio nel progetto “Wake Up” fino a cimentarsi in dinamiche avanzate di tracciamento della palla in “Ball Track”, ogni progetto offre uno sguardo unico sulla programmazione in Python per la robotica.
Che tu sia interessato a far pattugliare un’area al tuo PiDog, rispondere ai comandi vocali, eseguire flessioni o persino ululare a comando, c’è un progetto su misura per te. Inoltre, per chi cerca di estendere le capacità del proprio PiDog, offriamo tutorial su come integrare interfacce di controllo tramite tastiera e app.
- 1. Wake Up
- 2. Dimostrazione di Funzioni
- 3. Pattugliamento
- 4. Risposta
- 5. Riposo
- 6. Essere sollevato
- 7. Tracciamento del volto
- 8. Flessioni
- 9. Ululato
- 10. Bilanciamento
- 11. Gioca con PiDog tramite tastiera
- 12. Gioca con PiDog tramite APP
- 13. Tracciamento della palla
Programma semplice per verificare il funzionamento di base
Qui, abbiamo varie funzioni, suddividendole per una comprensione completa. Ogni sotto-argomento è dedicato a una funzione specifica, rendendo più facile per te comprenderle e implementarle. Che si tratti di iniziare con i parametri, controllare movimenti specifici o integrare input sensoriali, abbiamo coperto tutto. Naviga attraverso i sotto-argomenti qui sotto per iniziare il tuo viaggio nel coding con Pidog.
- 1. Inizializzazione PiDog
- 2. Movimento delle Gambe
- 3. Movimento della Testa
- 4. Movimento della Coda
- 5. Ferma Tutte le Azioni
- 6. Esegui Azione Preimpostata
- 7. PiDog Parla
- 8. Leggi Distanza
- 9. PiDog Striscia RGB
- 10. Lettura IMU
- 11. Rilevamento della Direzione del Suono
- 12. Accarezza la Testa del PiDog
- 13. Altro
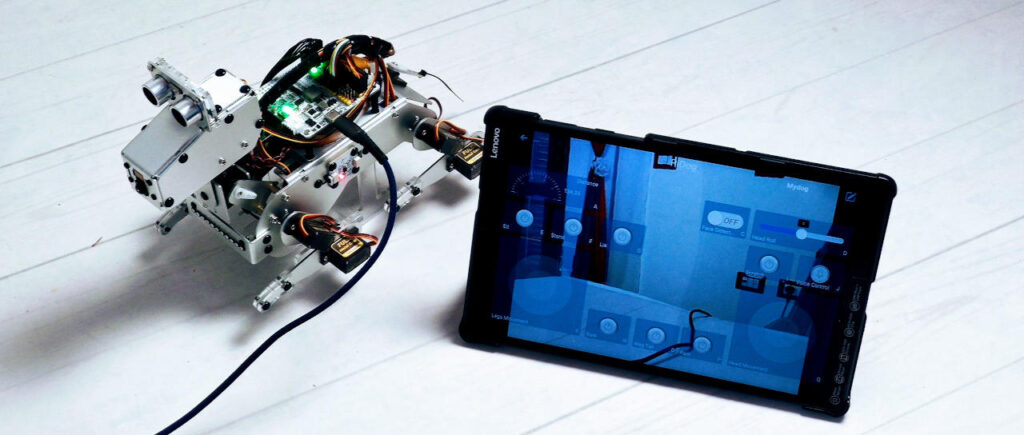
Inizia con l’app
Per verificare tutto il potenziale del PiDog, ti consiglio di utilizzare l’app di lavoro. Con questa opzione, puoi controllare e programmare il tuo PiDog direttamente dal tuo smartphone, migliorando la comodità e l’accessibilità nella gestione di vari comandi e routine. L’app offre un’interfaccia user-friendly, permettendoti di esplorare e sfruttare tutte le capacità del PiDog, dai movimenti di base alle interazioni avanzate. Questo approccio integrato ti assicura di poter massimizzare la funzionalità e godere di un’esperienza più interattiva con il tuo PiDog. Immergiti e scopri le infinite possibilità con questi progetti pratici in Python, e vivi gli aspetti divertenti ed educativi della robotica con il tuo PiDog!
Prima di tutto, avvia il programma ricevitore dell’app sul nostro PiDog.
cd ~/pidog/examples
sudo python3 12_app_control.py
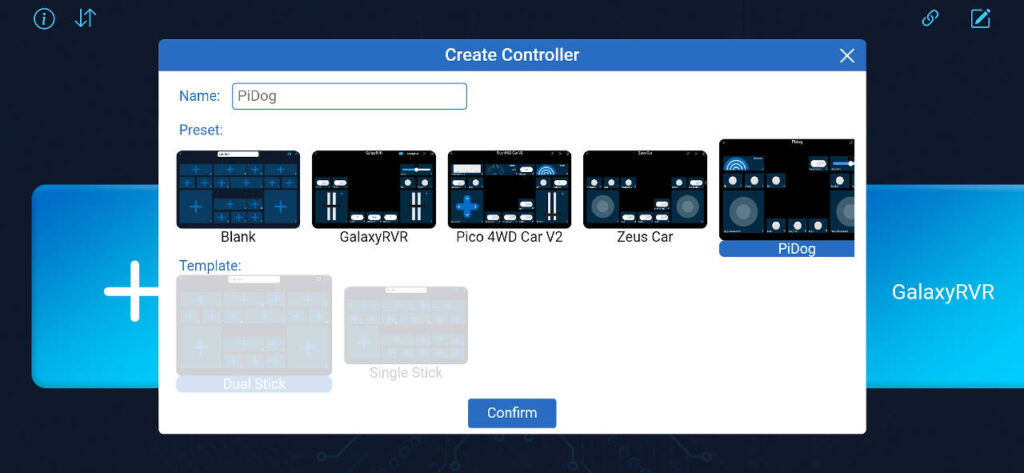
Ora installa il controller SunFounder sul tuo dispositivo Android usando questo link.
Quindi aggiungi il dispositivo PiDog.
E dopo la connessione, tutti i controlli e il feed della fotocamera.
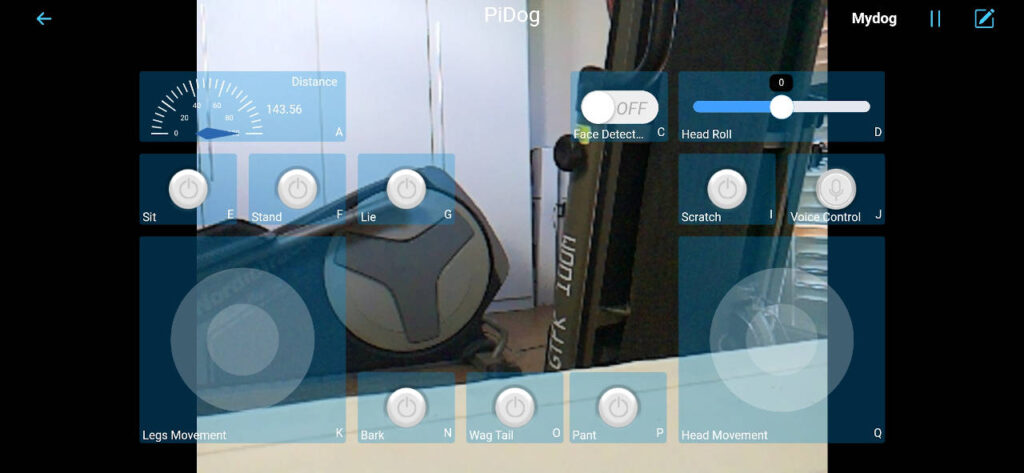
E infine, ecco una piccola demo.