
Costruire e programmare PiCar-X: iniziare con la tua macchina robotica
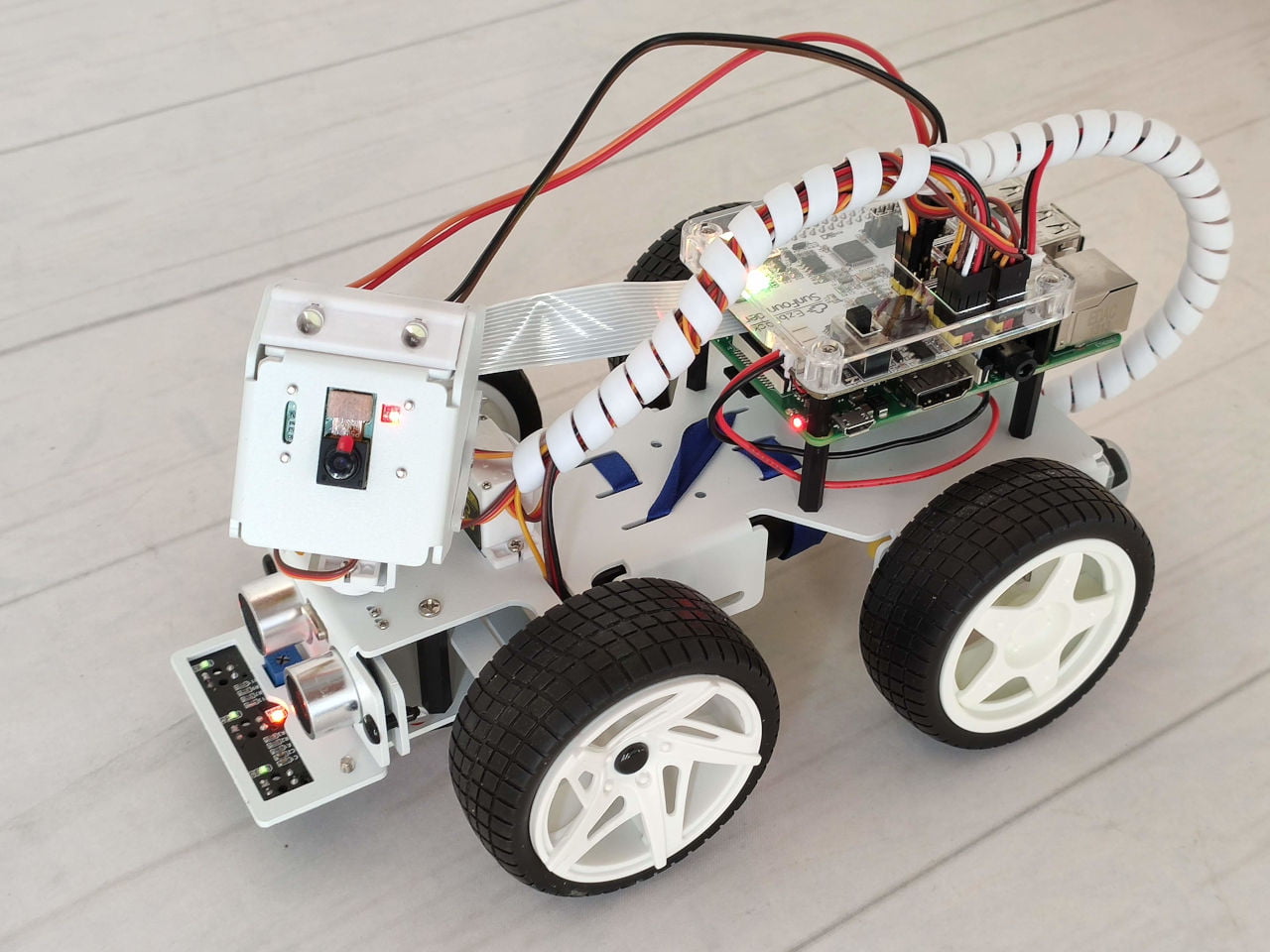
PiCar-X è un’auto robotica a guida autonoma progettata specificamente per la piattaforma Raspberry Pi. È un’auto robotica versatile dotata di un modulo telecamera a 2 assi, un modulo a ultrasuoni e moduli di tracciamento della linea, che offre un’ampia gamma di funzioni come il rilevamento di colori/viso/segnali stradali, l’evitamento automatico degli ostacoli e il tracciamento automatico della linea. Il PiCar-X supporta due linguaggi di programmazione, Blockly e Python, che si rivolgono sia ai principianti che ai programmatori avanzati.

In questa recensione approfondita, discuteremo le caratteristiche chiave di PiCar-X, le sue capacità di programmazione e il contenuto educativo fornito nella sua documentazione.
Ecco la pagina di SunFounder con il link per l’acquisto, oppure puoi scegliere Aliexpress, Amazon Italy, Amazon Germany, Amazon France, Amazon USA store
Caratteristiche principali
- Linguaggi di programmazione: PiCar-X supporta i linguaggi di programmazione Blockly e Python, per soddisfare gli utenti con diverse capacità di programmazione. Blockly è una scelta eccellente per i principianti, gli utenti più giovani o coloro che desiderano testare rapidamente il PiCar-X, mentre Python offre un controllo e una flessibilità più avanzati per i programmatori esperti.
- Modulo telecamera: il modulo telecamera a 2 assi consente a PiCar-X di eseguire un’ampia gamma di attività di visione artificiale, tra cui il rilevamento del colore, il rilevamento dei volti e il rilevamento dei segnali stradali. Questa funzione consente agli utenti di esplorare e sperimentare vari algoritmi e applicazioni di visione artificiale.
- Moduli a ultrasuoni e di tracciamento della linea: il modulo a ultrasuoni dota il PiCar-X di funzionalità automatiche per evitare gli ostacoli, mentre il modulo di tracciamento della linea consente il tracciamento automatico della linea. Queste funzionalità consentono agli utenti di conoscere la robotica e le applicazioni del mondo reale della navigazione autonoma.
- Controllo dell’app mobile: l’app SunFounder Controller offre agli utenti un modo conveniente per controllare in remoto il PiCar-X sui propri dispositivi mobili. Questa caratteristica si aggiunge all’accessibilità e alla facilità d’uso del PiCar-X.
- Contenuti educativi: la documentazione PiCar-X offre una vasta gamma di contenuti educativi, che coprono argomenti come la storia delle auto a guida autonoma, il deep learning, le reti neurali, l’assemblaggio dei componenti e altro ancora. Ciò rende PiCar-X un’eccellente risorsa di apprendimento per gli utenti interessati alla robotica, alla programmazione e all’intelligenza artificiale.
- Supporto multilingue: la documentazione PiCar-X è disponibile in inglese, con l’azienda che lavora per aggiungere il supporto per altre lingue. Ciò dimostra l’impegno dell’azienda nel rendere il PiCar-X accessibile a un pubblico globale.
Assemblaggio
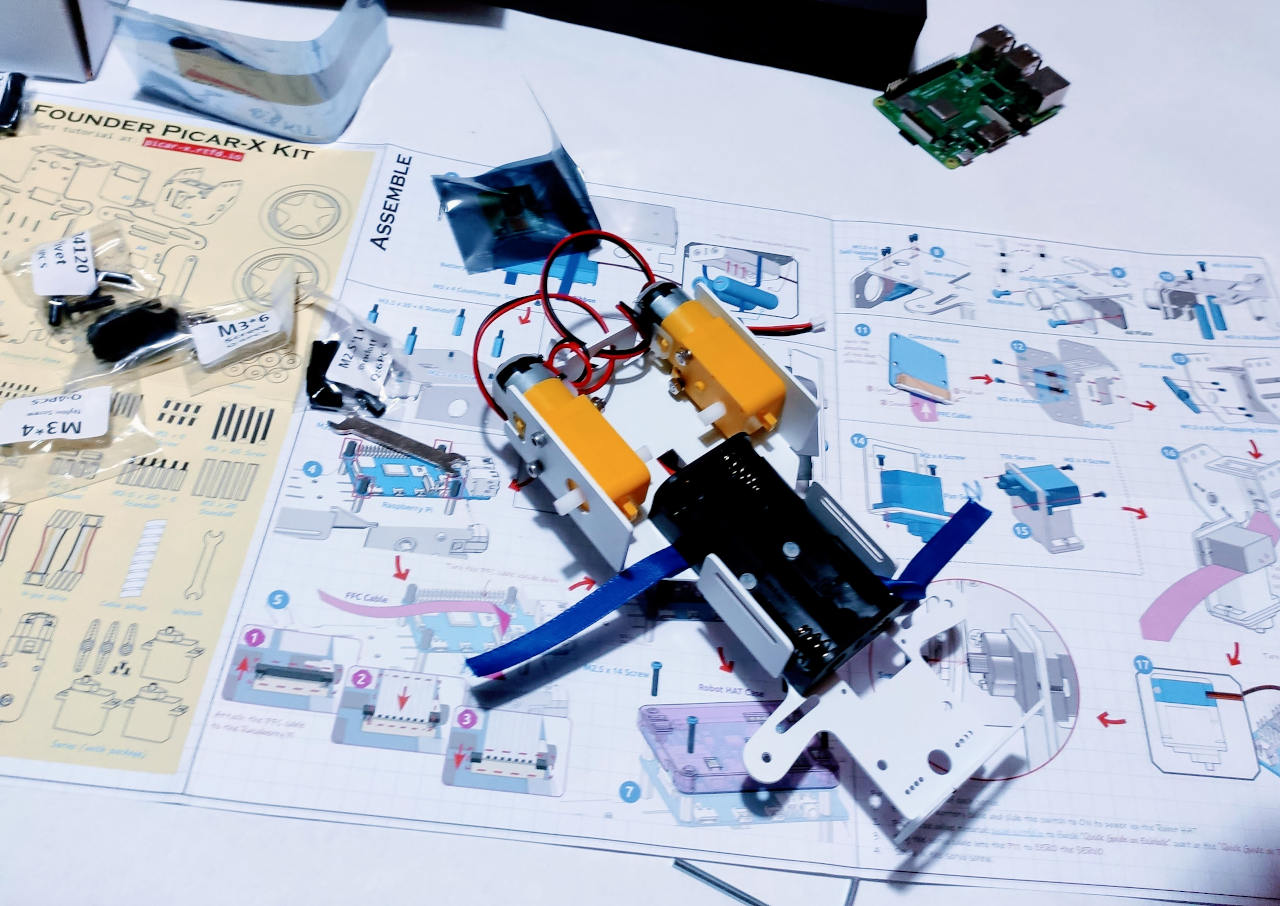
SunFounder fornisce una scheda completa con tutte le informazioni sulle istruzioni di montaggio.
Ricorda, il Raspberry Pi non è incluso, funziona con la versione 3b+ e 4. E hai bisogno di 2 batterie al litio 18650.
Ecco le batterie &nbps;AliExpress 18650 3.7v 3400mah
Requisiti:
- Kit PiCar-X
- Raspberry Pi (preferibilmente 3B+/4B)
- Scheda MicroSD (16 GB o superiore, Classe 10 o superiore)
- Alimentatore per Raspberry Pi (5V/3A per Pi 4 o 5V/2.5A per Pi 3)
- connessione internet
- Laptop/PC con Windows, macOS o Linux
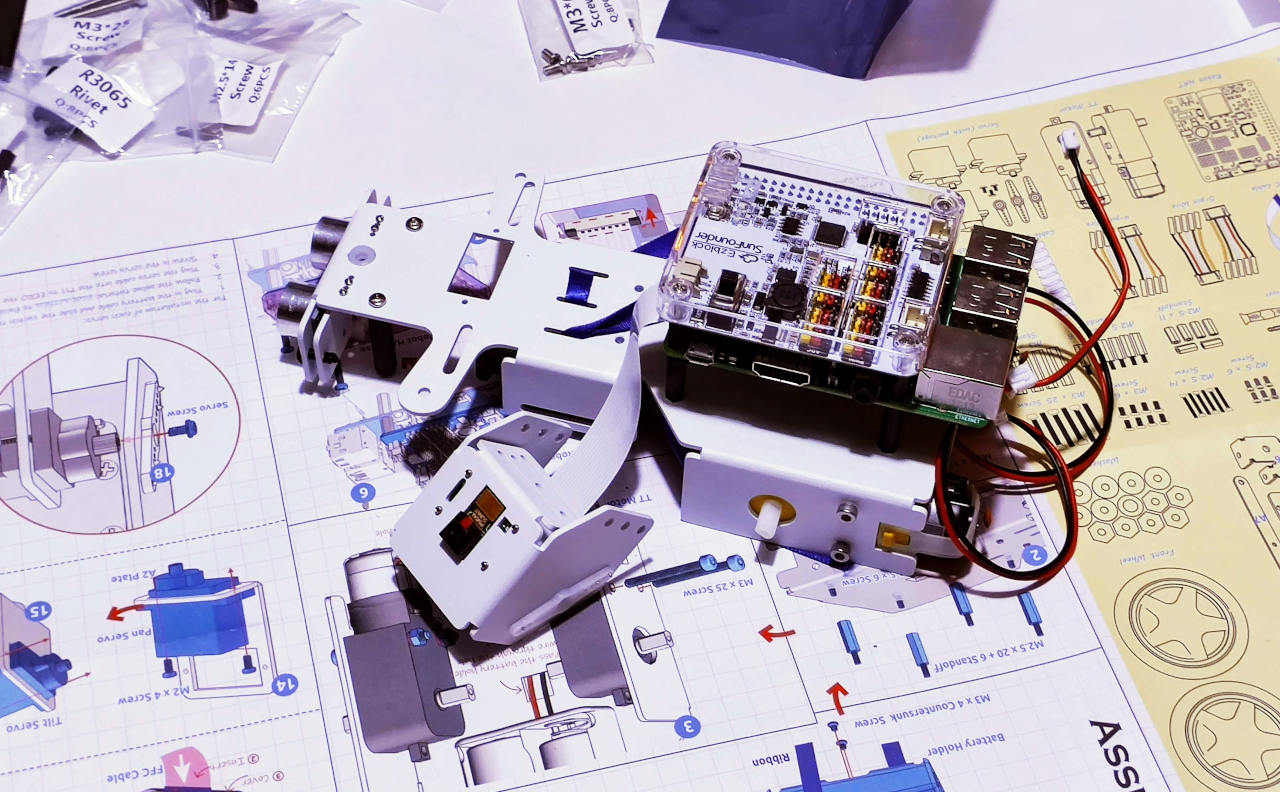
Ecco la scatola e il mio Raspberry Pi 3B+.

Come puoi vedere, sono tutti ben imballati e sono molto sorpreso che tutte le parti del corpo siano in metallo .

Tutti i passaggi sono molto semplici.
Inoltre, il Raspberry Pi con HAT si adatta perfettamente.
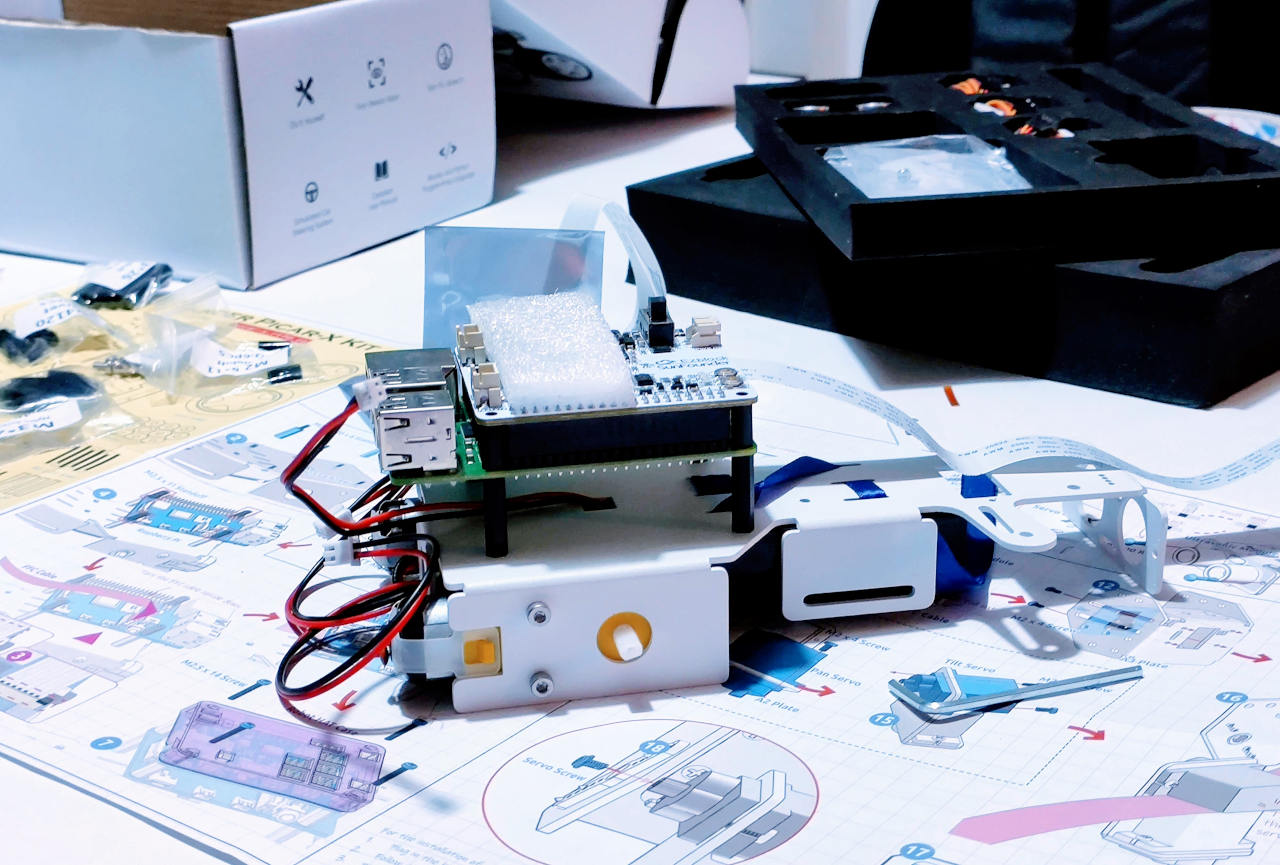
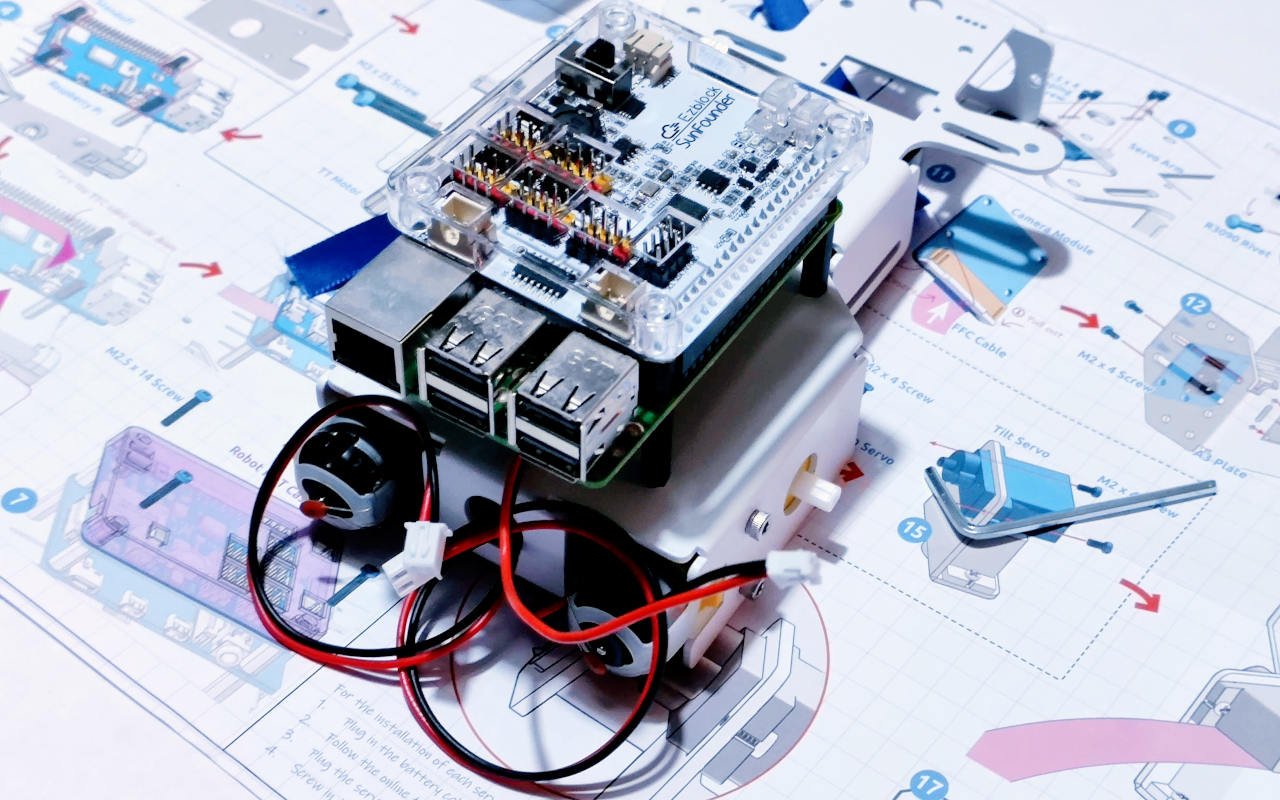
Ecco una visione migliore dell’HAT.
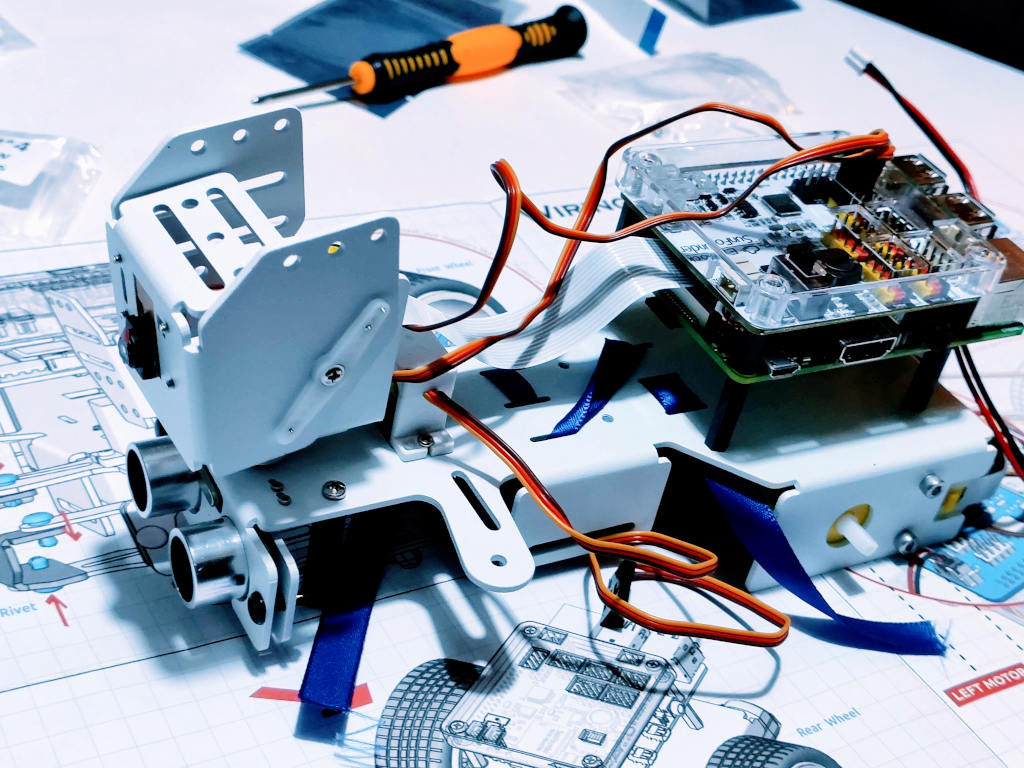
La testa dell’auto con la fotocamera è molto piccola.
È montata su due servomotori che consentono alla telecamera di muoversi in modo indipendente in tutte le direzioni.
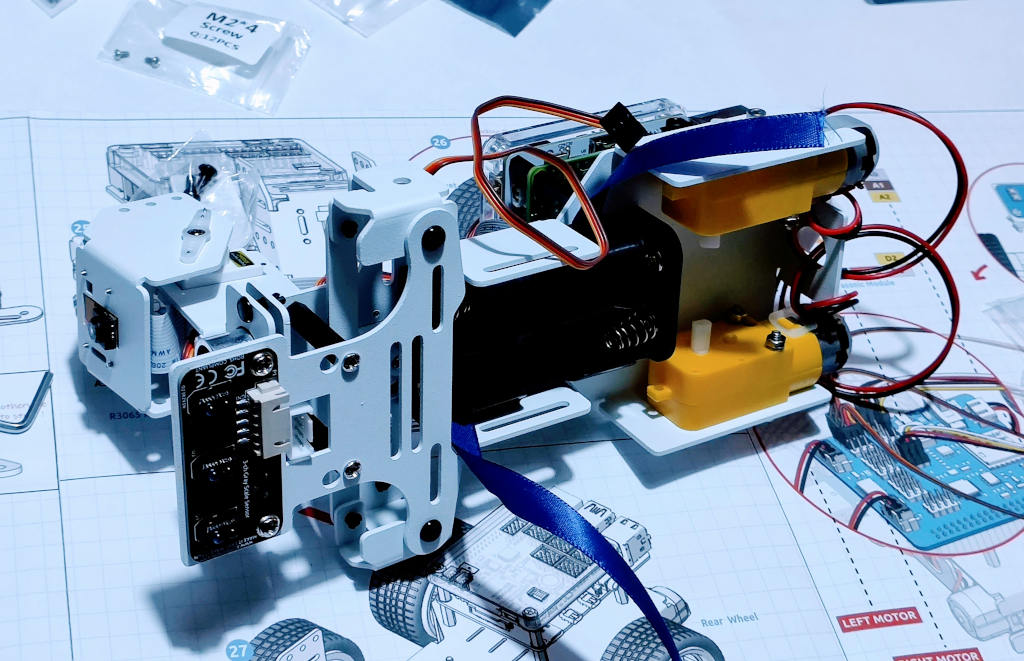
Ecco un dettaglio dei supporti delle ruote.
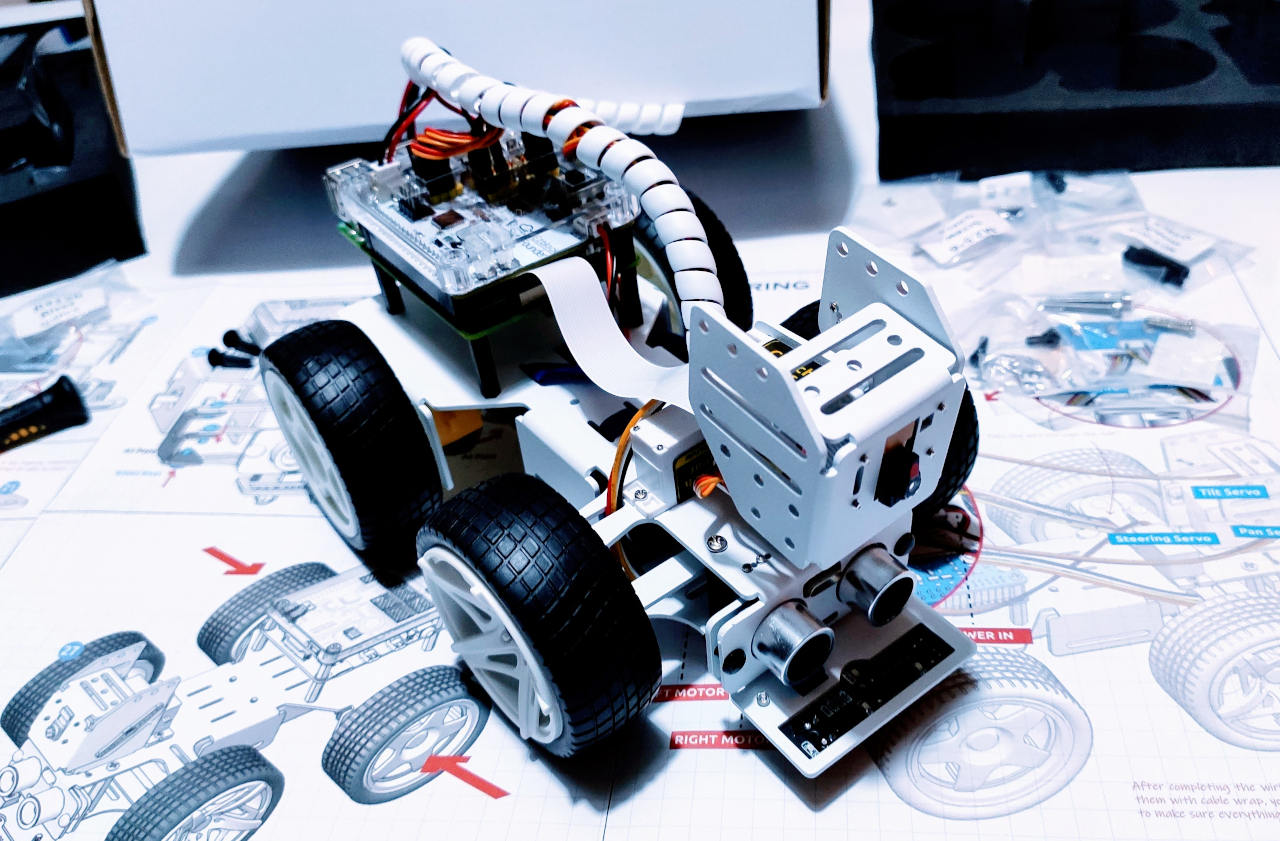
Infine, l’auto con tutti gli elementi è molto bella.
Configurazione del Raspberry Pi per EzBlock
Ora abbiamo il nostro PiCar-X pronto, ma dobbiamo aggiungere il software. C’è una pagina dedicata per il firmware.
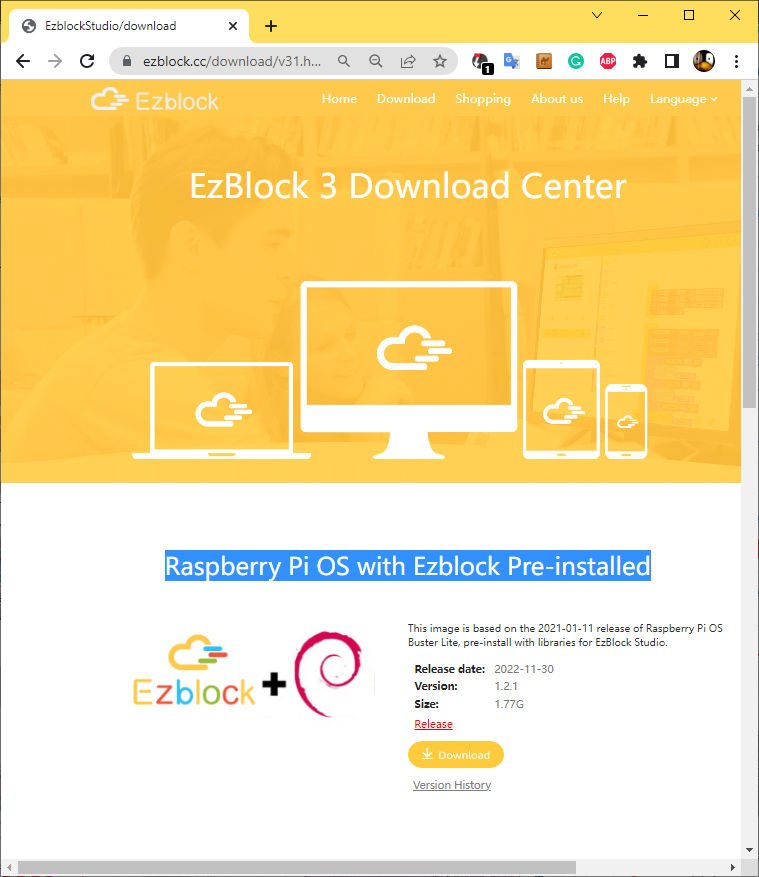
- Scarica il sistema operativo Raspberry Pi con il firmware EzBlock preinstallato da qui .
- Usa uno strumento di scrittura di immagini come Raspberry Pi Imager per scrivere l’immagine scaricata sulla tua scheda microSD.
- Inserisci la scheda microSD nel Raspberry Pi, collega l’alimentatore e accendilo.
Collegamento di Ezblock Studio a PiCar-X
La prima volta che ti incoraggio a utilizzare un dispositivo mobile con l’ app EzBlock studio , perché possiamo utilizzare il Bluetooth per impostare l’indirizzo IP.
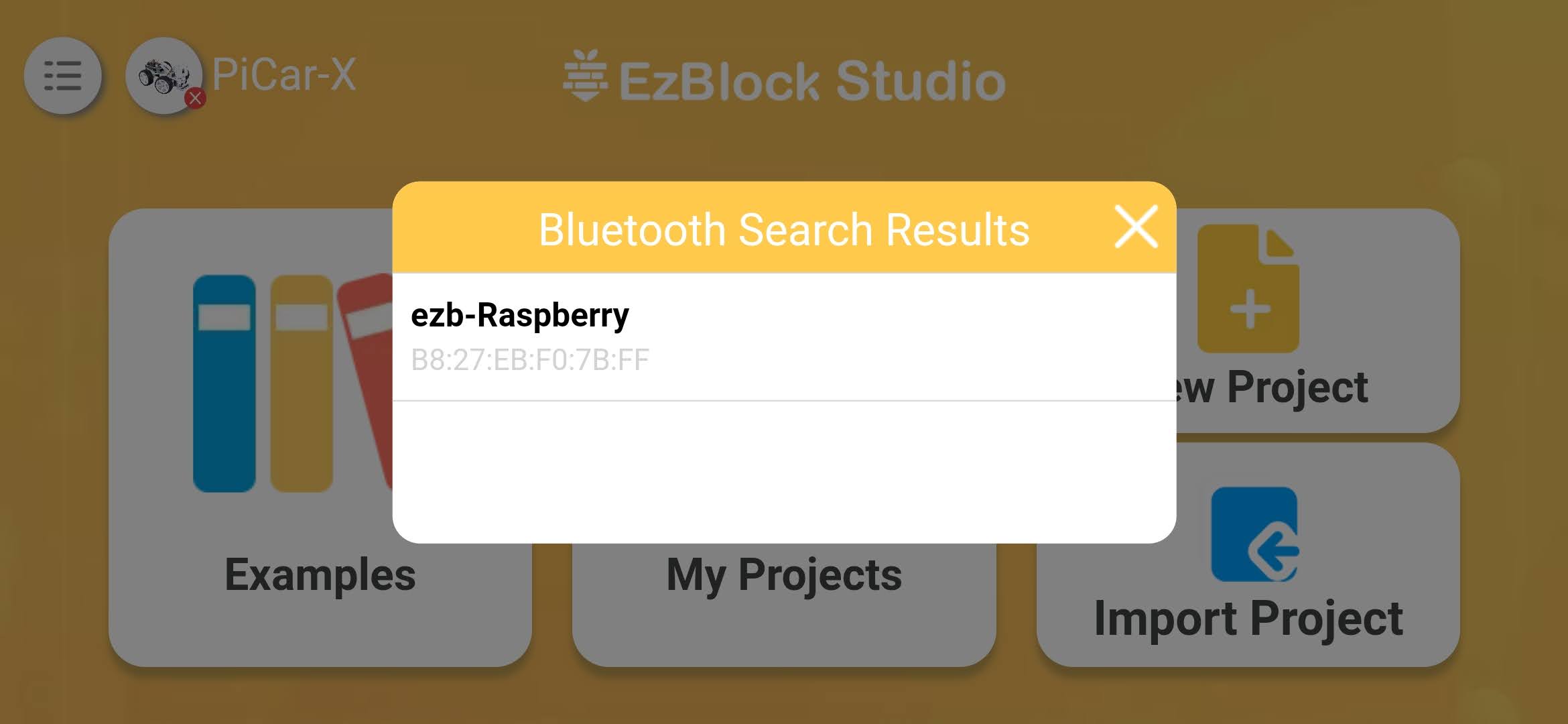
- Apri l’app e seleziona il dispositivo.
- Premere collegare tramite dispositivo Bluetooth vengono immediatamente riconosciuti. Cliccaci sopra.
- Ora possiamo andare a configurare la connessione wifi.
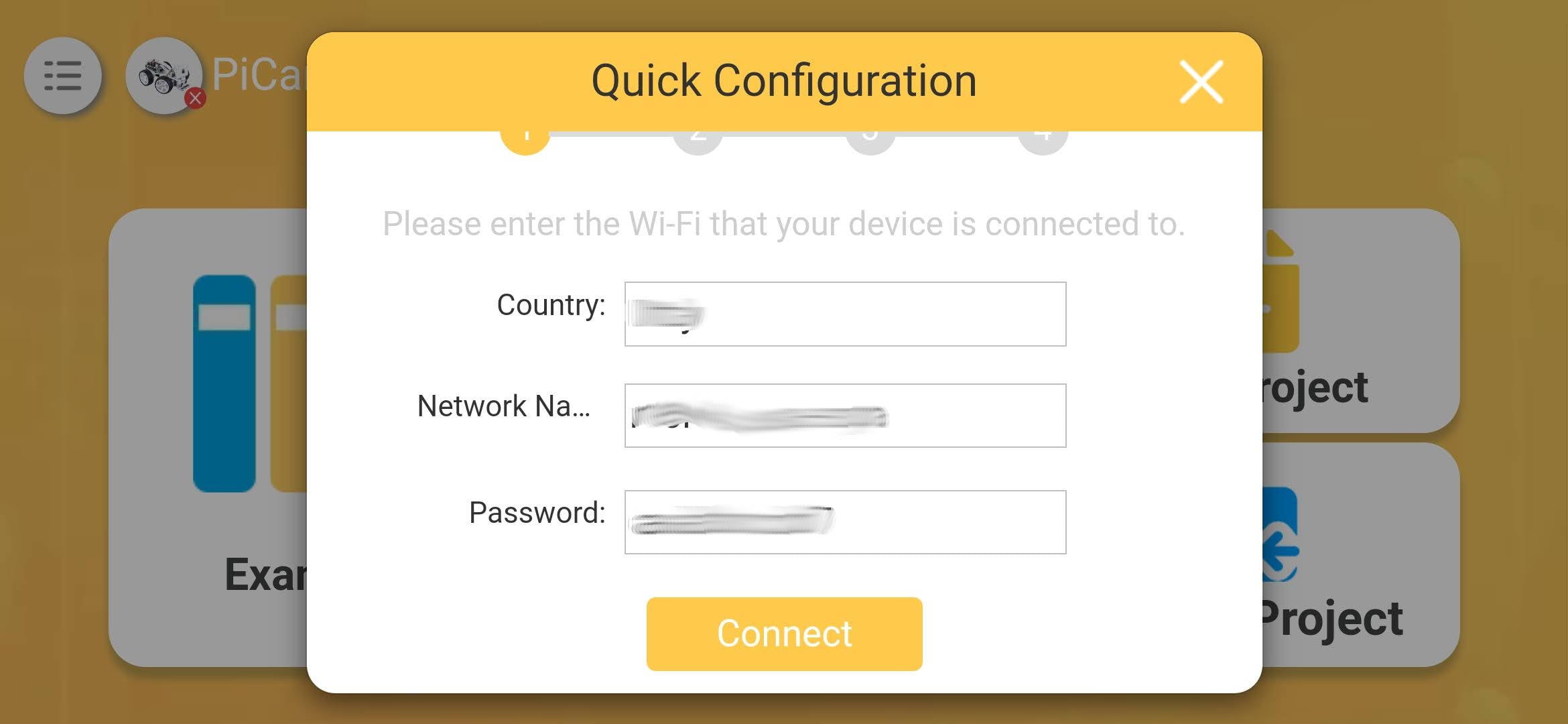
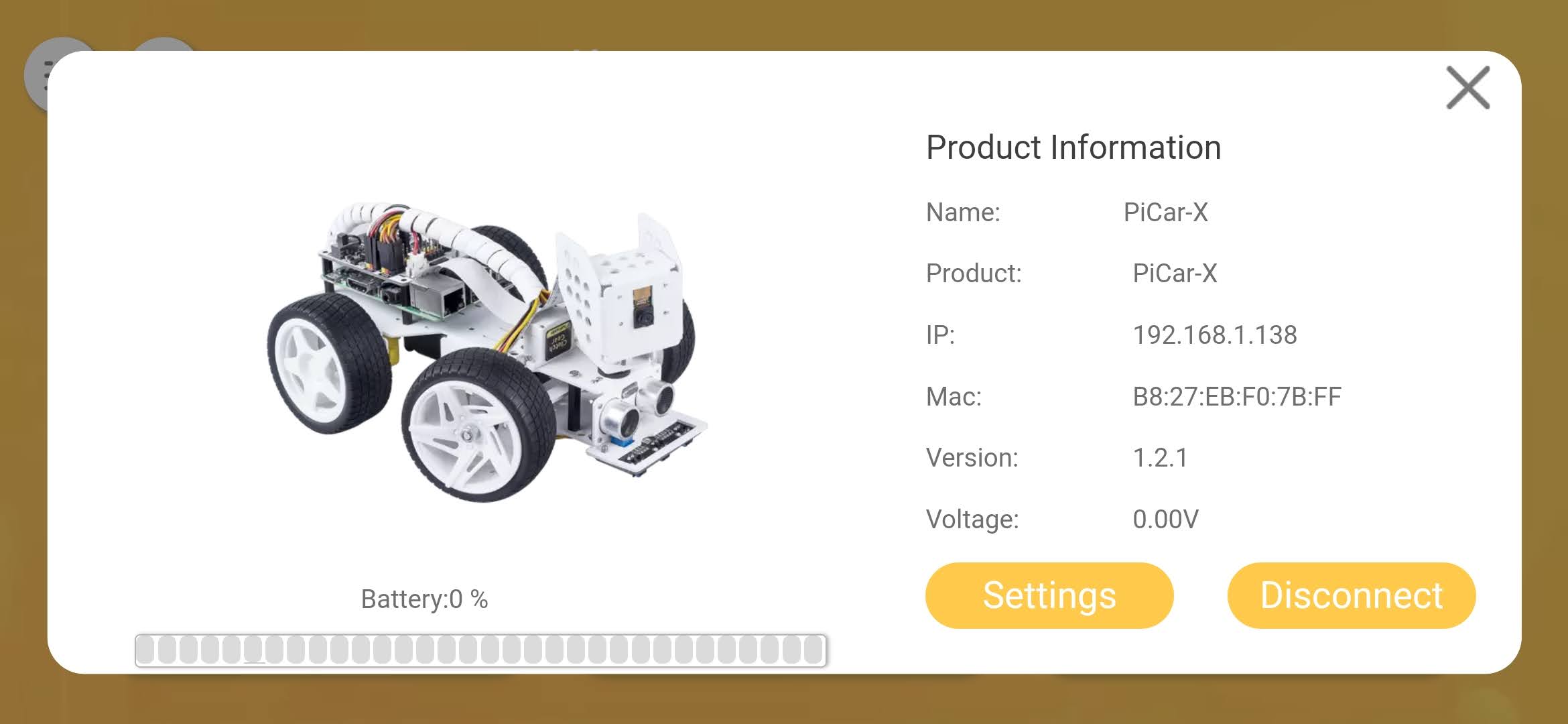
- Quindi possiamo ottenere l’IP.
Puoi avviare la calibrazione tramite l’app, ma preferisco farlo sul mio PC.
- Avvia Ezblock Studio sul tuo computer.
- Clicca sull’icona in alto a sinistra e seleziona il tuo dispositivo
- Sull’icona in alto a sinistra e fai clic su “Connetti”.
- Inserisci l’indirizzo IP.
- Una volta connesso, lo stato dovrebbe cambiare in “Connesso” nella scheda Dispositivi.
Inizia a programmare con EzBlock
Cos’è Ezblock?
EzBlock è un linguaggio di programmazione grafico progettato specificamente per PiCar-X. È un ambiente di programmazione intuitivo e facile da usare che consente agli utenti di creare programmi complessi utilizzando blocchi di trascinamento della selezione. Ciò significa che gli utenti non devono imparare un linguaggio di programmazione complicato o una sintassi per creare programmi funzionali per PiCar-X. Invece, possono utilizzare un’interfaccia visiva per progettare e codificare i loro programmi.
Come funziona EzBlock?
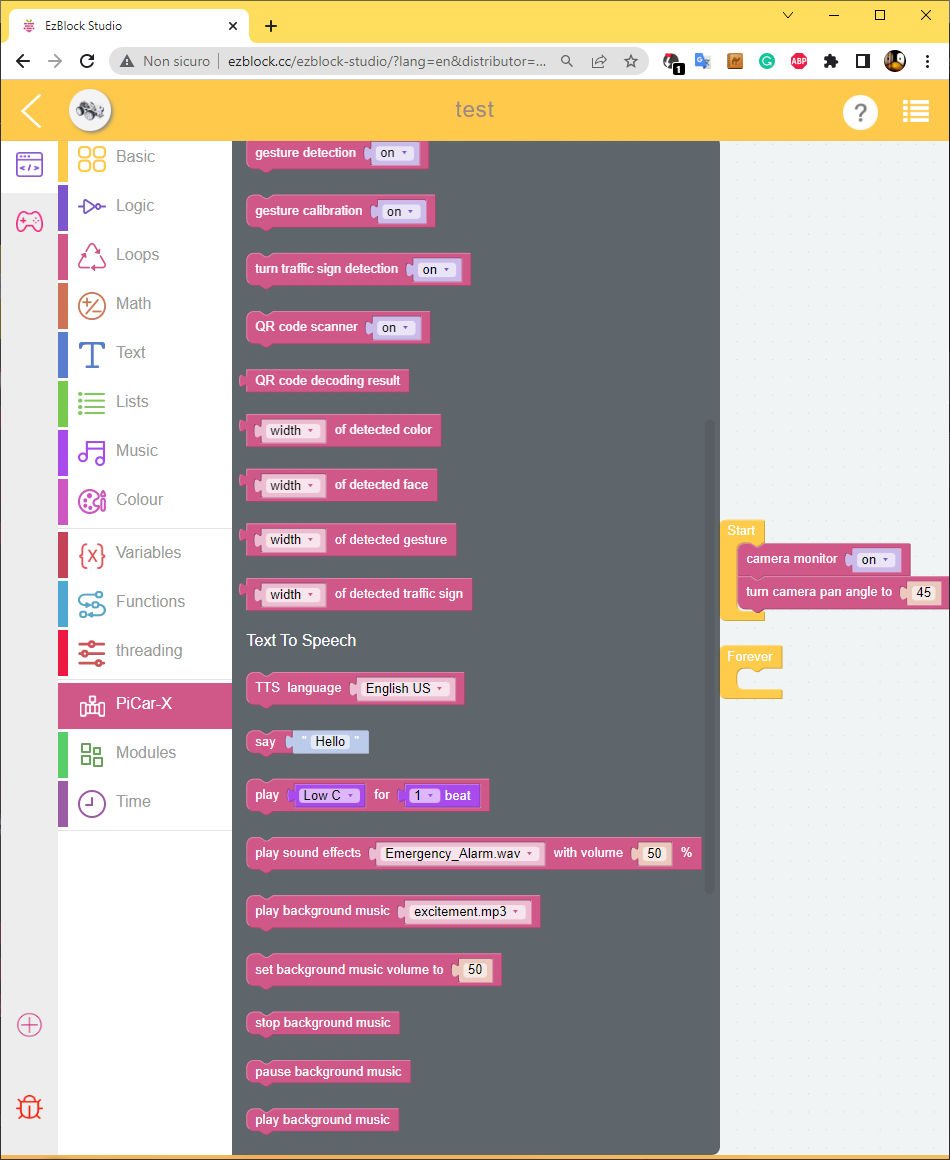
EzBlock si basa sul linguaggio di programmazione visuale Blockly. Blockly è un progetto open source sviluppato da Google che consente agli utenti di creare programmi utilizzando blocchi che rappresentano il codice. Questi blocchi possono essere trascinati e rilasciati su una tela e possono essere collegati per formare un programma. EzBlock prende il concetto Blockly e aggiunge blocchi specifici PiCar-X per creare un ambiente di programmazione user-friendly per PiCar-X.
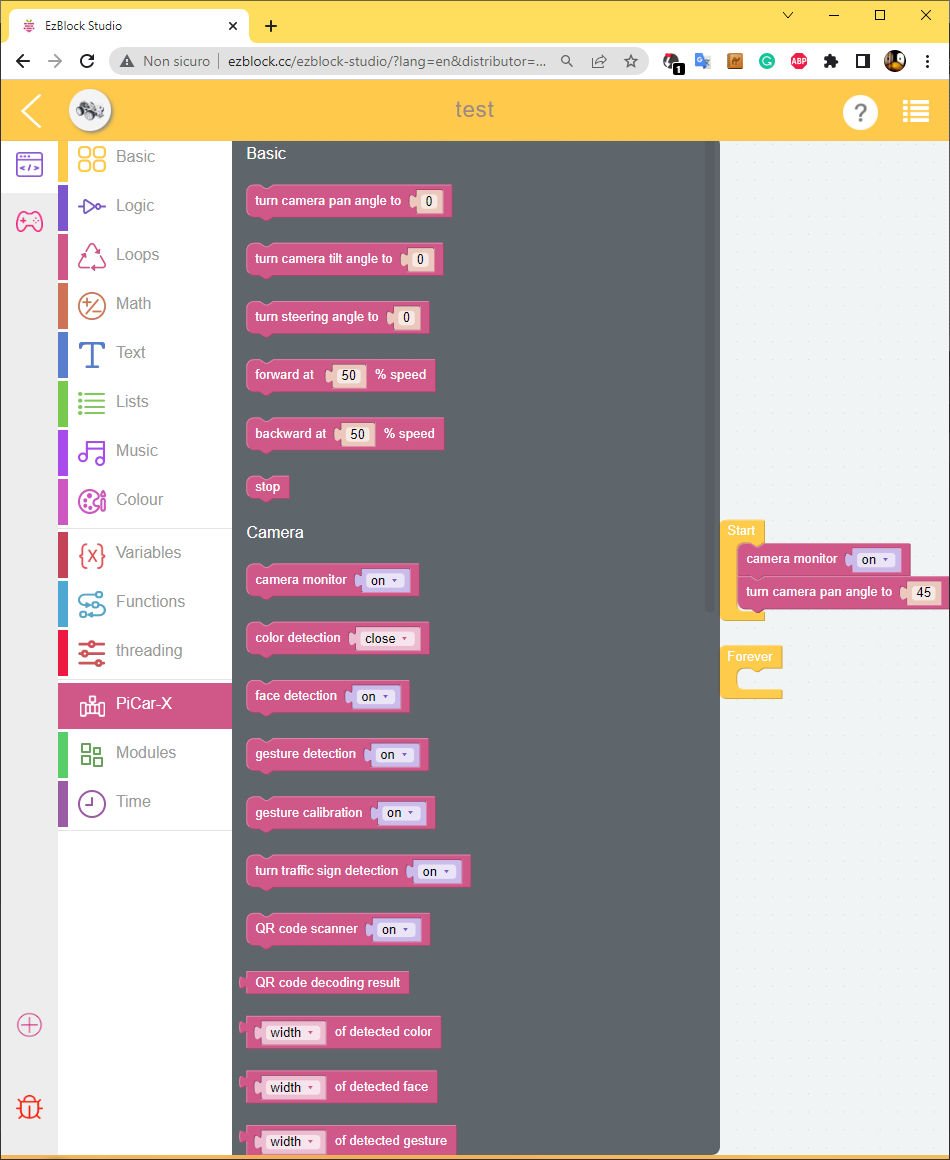
EzBlock consente agli utenti di controllare i motori, i sensori e altri componenti del PiCar-X trascinando e rilasciando i blocchi su una tela. Ad esempio, per far avanzare il PiCar-X, gli utenti possono trascinare un blocco “imposta velocità motore” sulla tela e impostare il valore della velocità su un numero positivo. Allo stesso modo, per girare il PiCar-X a sinistra oa destra, gli utenti possono trascinare un blocco “imposta velocità motore” sulla tela e impostare di conseguenza i valori di velocità per ciascun motore.
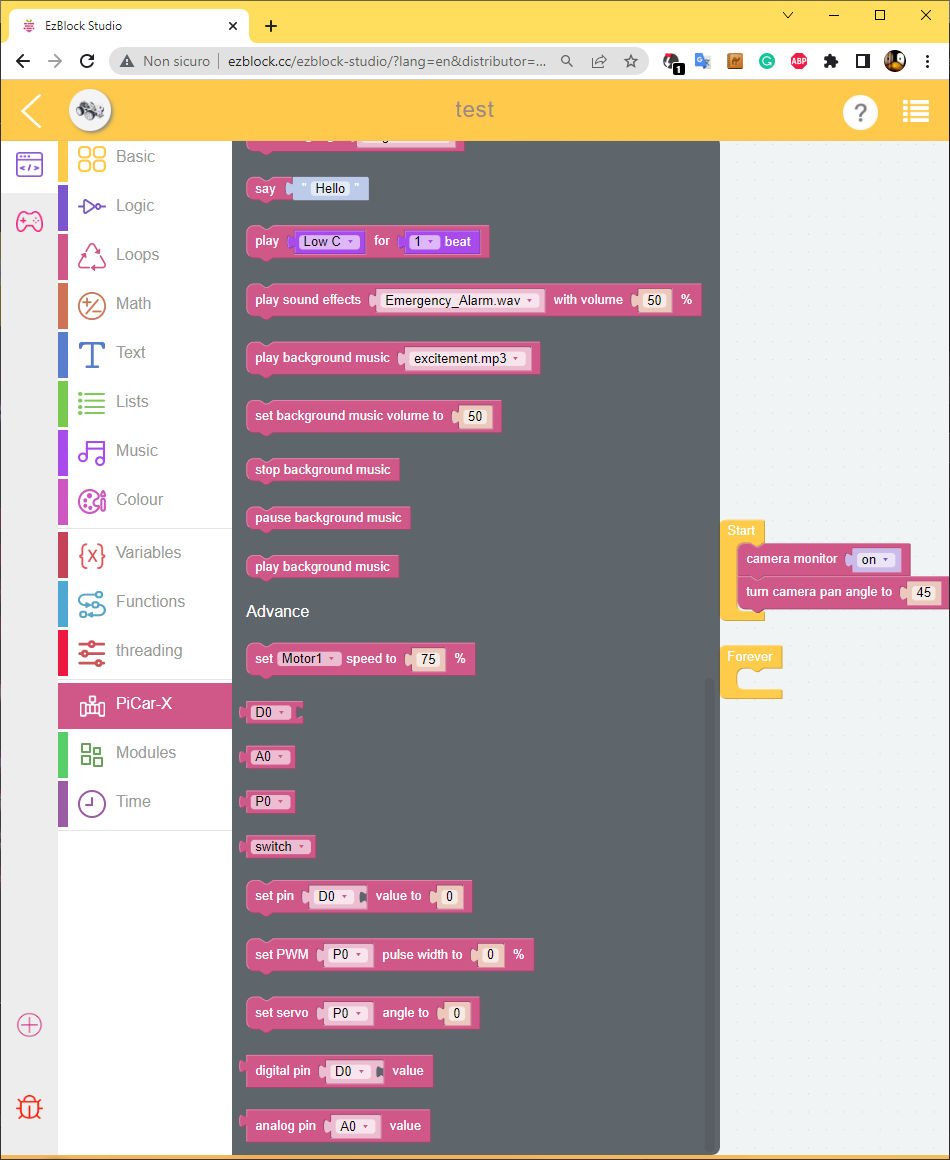
EzBlock include anche blocchi per il controllo dei sensori del PiCar-X. Ad esempio, per utilizzare il sensore a ultrasuoni di PiCar-X, gli utenti possono trascinare un blocco di “lettura del sensore a ultrasuoni” sulla tela e specificare quale porta del sensore utilizzare. Il valore del sensore può quindi essere utilizzato in istruzioni condizionali o altri blocchi per creare programmi più complessi.
L’IDE di programmazione EzBlock include una sezione di strumenti che fornisce agli utenti vari strumenti per controllare e interagire con il proprio PiCar-X. La sezione degli strumenti si trova sul lato destro dell’IDE e include diversi componenti, come il joystick, lo slider, il video e altro.
Il componente joystick consente agli utenti di controllare il movimento del PiCar-X utilizzando un joystick virtuale. Questo joystick può essere trascinato sullo schermo per controllare la direzione del PiCar-X e gli utenti possono regolare la sensibilità del joystick per ottimizzare il controllo.
Il componente slider fornisce agli utenti un modo per regolare la velocità del PiCar-X. Questo dispositivo di scorrimento può essere trascinato a sinistra oa destra per regolare la velocità del PiCar-X e gli utenti possono impostare i valori di velocità massima e minima per le loro esigenze specifiche.
Il componente video visualizza il feed video in diretta dalla fotocamera del PiCar-X. Ciò consente agli utenti di vedere ciò che vede il PiCar-X e può essere utilizzato per il controllo remoto e la guida autonoma.
Nel complesso, la sezione degli strumenti dell’IDE di programmazione EzBlock offre agli utenti una varietà di strumenti per controllare e interagire con il loro PiCar-X. Questi componenti rendono facile per gli utenti programmare e controllare il PiCar-X senza dover scrivere codice complesso o utilizzare hardware esterno.
Perché usare EzBlock per programmare il PiCar-X?
Ci sono diversi motivi per cui EzBlock è un’ottima opzione per programmare il PiCar-X:
Facile da usare
L’interfaccia drag-and-drop di EzBlock rende facile per gli utenti creare programmi funzionali per PiCar-X senza dover imparare un complesso linguaggio di programmazione o sintassi.
Blocchi specifici per PiCar-X
EzBlock include blocchi specifici di PiCar-X che consentono agli utenti di controllare motori, sensori e altri componenti di PiCar-X senza dover scrivere codice di basso livello.
Raspberry Pi HAT
Ora faremo un semplice esempio. Prima di tutto vorrei mostrare l’HAT e le sue specifiche.
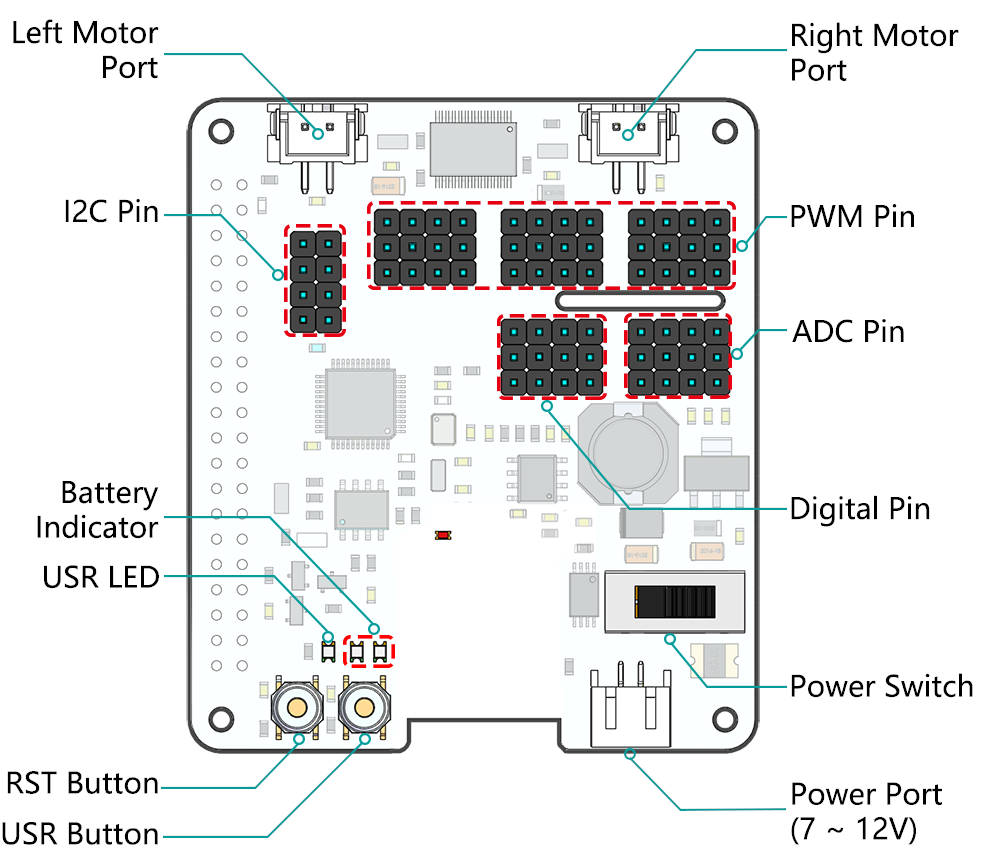
Porta motore sinistra/destra
- Porte motore XH2.54 a 2 canali.
- La porta sinistra è collegata a GPIO 4 e la porta destra è collegata a GPIO 5.
Perno I2C
- Pin I2C a 2 canali da Raspberry Pi.
Perno PWM
- Pin PWM a 12 canali, P0-P12.
Pin dell’ADC
- Pin ADC a 4 canali, A0-A3.
Perno digitale
- Pin digitali a 4 canali, D0-D3.
Indicatore di batteria
- Due LED si accendono quando la tensione è superiore a 7,8V.
- Un LED si accende nell’intervallo da 6,7 V a 7,8 V.
- Al di sotto di 6,7 V, entrambi i LED si spengono.
USR LED
- Impostato dal tuo programma. (L’uscita 1 accende il LED; l’uscita 0 lo spegne.)
Pulsante RST
- Una breve pressione del pulsante RST provoca il ripristino del programma.
- Premi a lungo il pulsante RST finché il LED non si accende, quindi rilascialo e disconnetterai il Bluetooth.
Pulsante USR
- Le funzioni del pulsante USR possono essere impostate dalla programmazione. (Premendo verso il basso si ottiene un ingresso “0”; rilasciando si produce un ingresso “1”. )
Interruttore di alimentazione
- Attiva/disattiva l’alimentazione del robot HAT.
- Quando colleghi l’alimentazione alla porta di alimentazione, il Raspberry Pi si avvierà. Tuttavia, sarà necessario portare l’interruttore di alimentazione su ON per abilitare Robot HAT.
Porta di alimentazione
- Ingresso alimentazione 7-12V PH2.0 a 2 pin.
- Alimentare contemporaneamente Raspberry Pi e Robot HAT.
Esempio semplice
Vorrei aggiungere due led per avere luce quando voglio, quindi “aggiorneremo” il PiCar-X. Utilizziamo i pin PWM in modo da poter gestire l’intensità della luce.
Adattatore led stampato in 3D
Ho creato un semplice adattatore per aggiungere due led nella testa del PiCar-X.
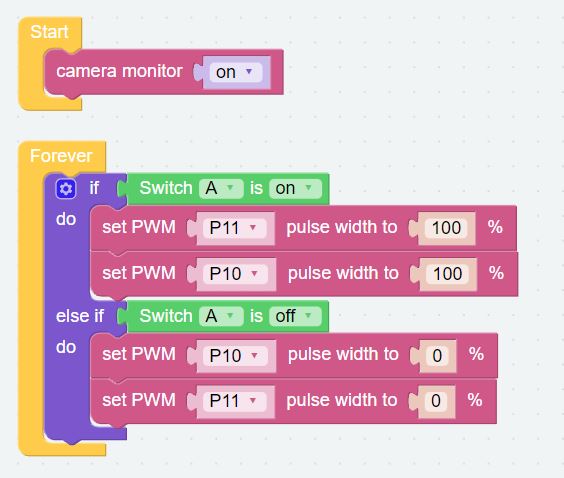
Codice
Ecco un semplice schizzo Blink con due LED collegati a P11 (anodo su giallo e catodo su nero) e P10.

Il risultato è questo.
Controlla la fotocamera e la luce
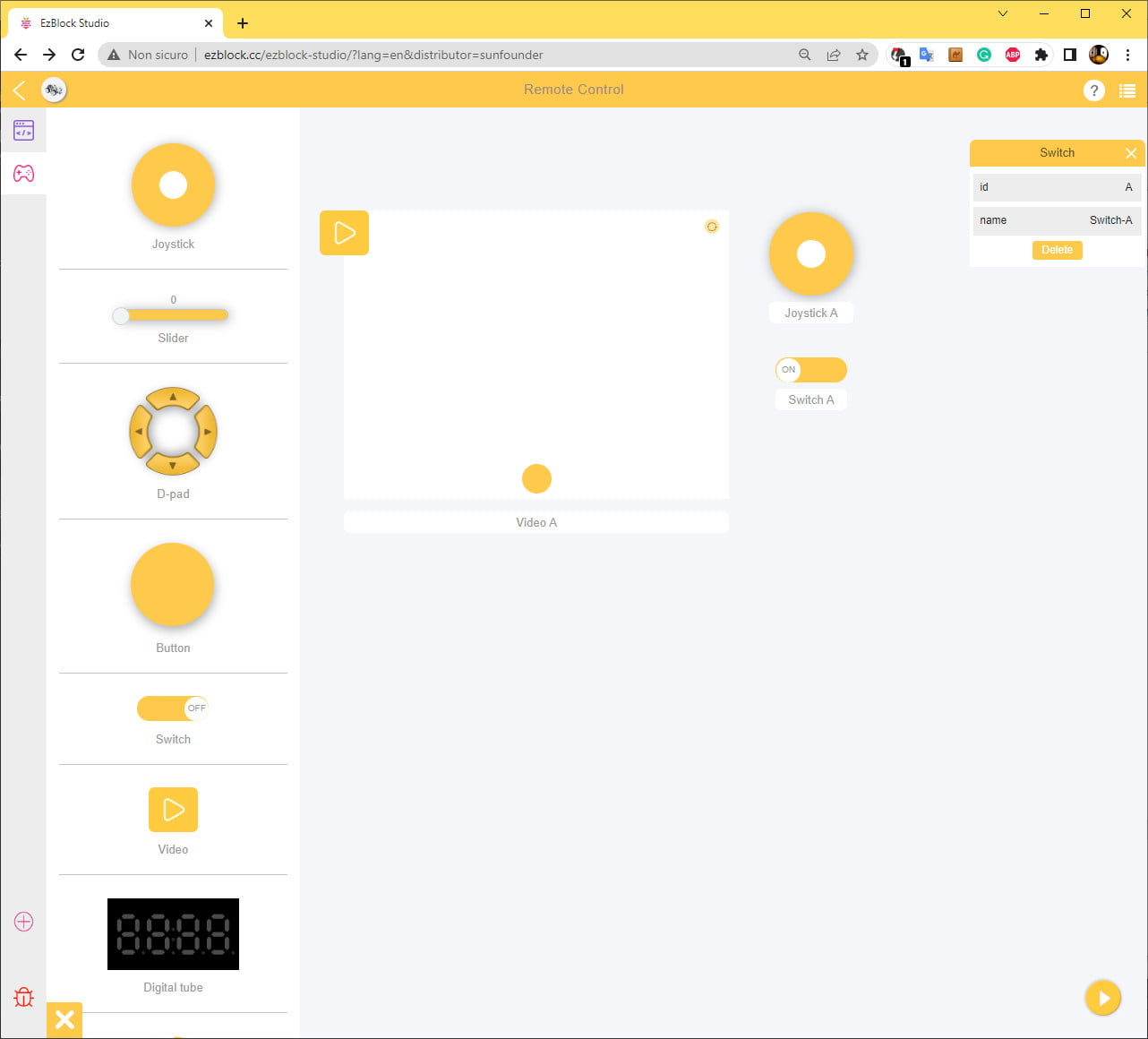
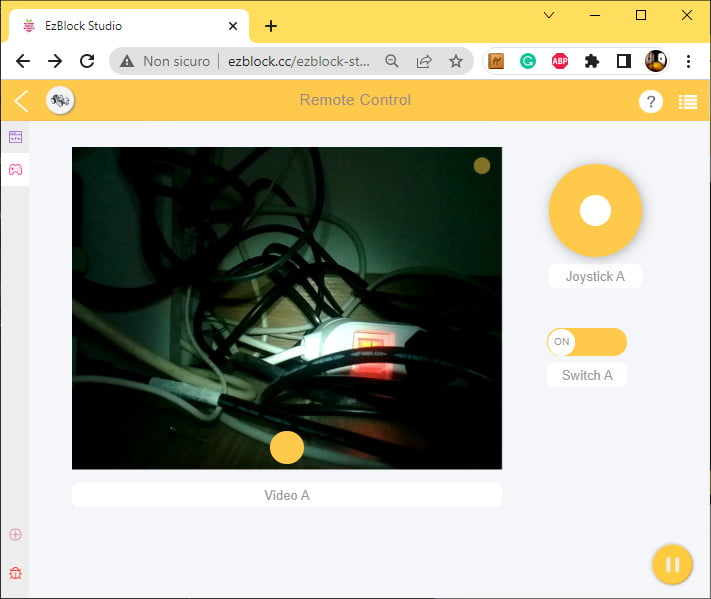
Ora utilizzeremo gli strumenti di controllo virtuale forniti dalla piattaforma.
Creo un semplice programma che ci permette di accendere o spegnere il meno e visualizzare la telecamera sullo schermo.
Ecco la scheda che permette l’aggiuntadei controlli per creare l’interfaccia utente.
Il risultato con i LED spenti.
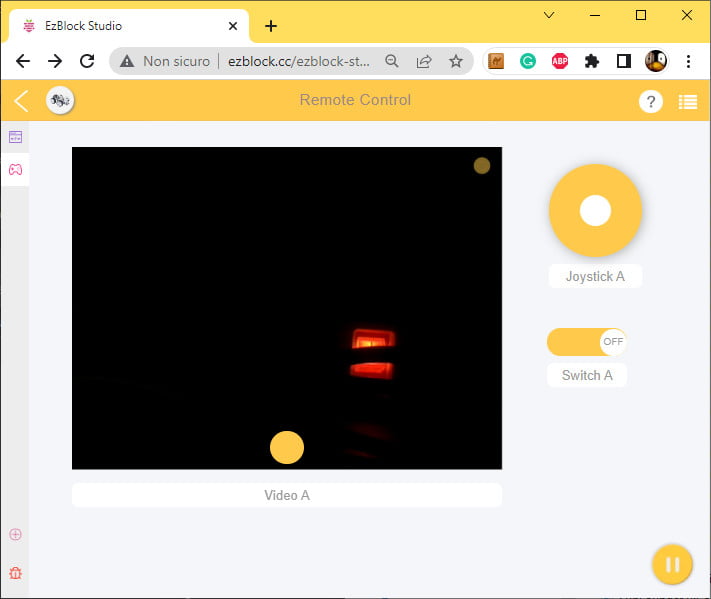
E con i LED accesi.
Grazie
PiCar-X è un’auto robotica a guida autonoma altamente versatile, guidata dall’intelligenza artificiale, che si rivolge a utenti di tutte le età e livelli di esperienza di programmazione. La sua ampia documentazione, il supporto per più linguaggi di programmazione e un’ampia gamma di funzionalità lo rendono un eccellente strumento educativo e un modo coinvolgente per conoscere la robotica, la visione artificiale e la programmazione.
Che tu sia un principiante interessato ad esplorare il mondo della programmazione e della robotica o un programmatore avanzato alla ricerca di una piattaforma per sperimentare l’intelligenza artificiale e la visione artificiale, PiCar-X offre qualcosa per tutti. Con la sua vasta gamma di funzioni e applicazioni, il PiCar-X può essere una preziosa aggiunta al toolkit di qualsiasi appassionato di robotica.











