Il Visualizzatore di Modelli 3D è uno strumento web interattivo progettato per aiutarti a visualizzare e testare la posizione e l’orientamento assoluti dei sensori a 9 gradi di libertà (DOF), come il BNO055 e l’MPU9250. Questo visualizzatore ti consente di collegare i tuoi sensori direttamente al browser utilizzando l’API Web Serial, fornendo un feedback in tempo reale sui dati di orientamento. Che tu stia lavorando in ambito robotico, droni o qualsiasi progetto che coinvolga la fusione di sensori, questo strumento offre un modo semplice per monitorare e analizzare i dati del sensore attraverso la rappresentazione visiva.
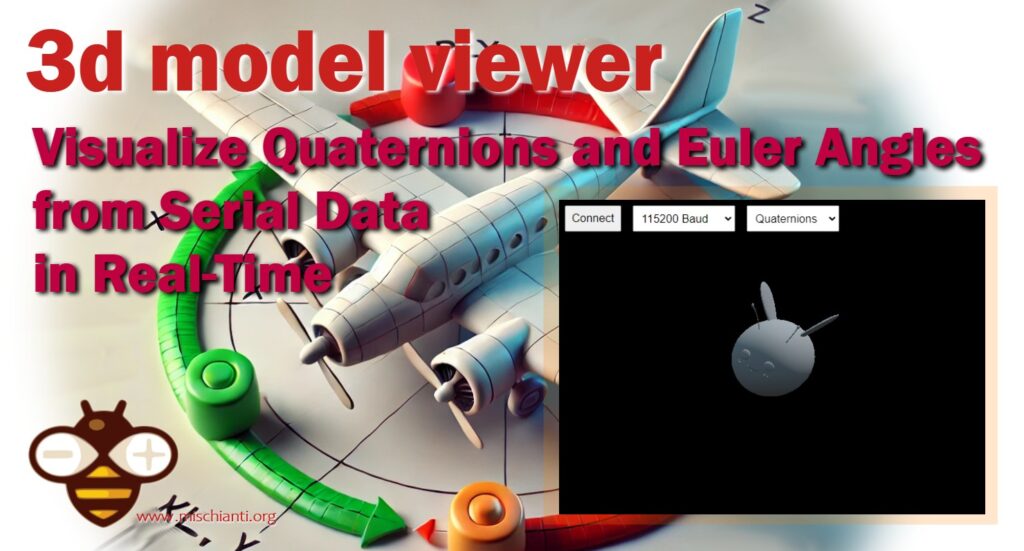
In questo Visualizzatore di Modelli 3D, puoi vedere una rappresentazione virtuale di un’ape, che si muove in sincronia con i dati in tempo reale trasmessi dal tuo sensore a 9 DOF collegato. Man mano che il sensore cambia posizione nello spazio—modificando il suo orientamento sugli assi X, Y o Z—il modello dell’ape si aggiorna di conseguenza, riflettendo questi movimenti in tempo reale.
Per iniziare, seleziona le impostazioni appropriate dalle opzioni disponibili. Scegli la porta seriale e la velocità di trasmissione corrette per adattarsi alla configurazione del tuo sensore, quindi decidi se visualizzare i dati utilizzando i quaternioni o gli angoli di Eulero. Man mano che regoli l’orientamento del sensore, osserva il modello dell’ape ruotare e muoversi lungo gli assi X, Y e Z. Questo fornisce un modo intuitivo per comprendere come il sensore interpreta il movimento e l’orientamento nello spazio 3D.
Questo visualizzatore è particolarmente utile per testare e calibrare i sensori a 9 DOF come il BNO055 o l’MPU9250, assicurandoti che i dati del tuo sensore siano accurati e pronti per essere utilizzati nei tuoi progetti. Che tu stia sviluppando robotica, sistemi VR o altre applicazioni basate sul movimento, questo strumento ti offre la visione necessaria per perfezionare i tuoi dispositivi e dare vita ai tuoi progetti 3D.
Casi d’uso:
- Testare l’orientamento del sensore: Il visualizzatore è ideale per testare l’orientamento assoluto di sensori come il BNO055 e l’MPU9250. Man mano che muovi il sensore, il modello 3D reagisce in tempo reale, aiutandoti a verificare che il sensore interpreti correttamente il movimento.
- Debug dei dati del sensore: Utilizza il visualizzatore per identificare e risolvere problemi con i dati di orientamento del sensore, assicurandoti che il tracciamento del movimento del tuo progetto sia accurato e affidabile.
- Strumento educativo: Per chi sta imparando a conoscere i sensori a 9 DOF e le loro applicazioni, il visualizzatore fornisce un modo pratico per esplorare il funzionamento di questi sensori, rendendo più facili da comprendere concetti complessi.
Dati di input
Angoli di Eulero
Gli angoli di Eulero sono un metodo per rappresentare l’orientamento di un oggetto nello spazio 3D utilizzando tre angoli. Questi angoli corrispondono alle rotazioni attorno ai tre assi principali (X, Y e Z). Tipicamente, queste rotazioni sono chiamate Roll, Pitch e Yaw:
- Roll: Rotazione attorno all’asse X.
- Pitch: Rotazione attorno all’asse Y.
- Yaw: Rotazione attorno all’asse Z.
Gli angoli di Eulero sono intuitivi perché scompongono le rotazioni complesse in 3D in tre rotazioni più semplici e sequenziali. Tuttavia, presentano una limitazione nota come “gimbal lock”, in cui due dei tre assi si allineano, causando la perdita di un grado di libertà e rendendo alcune rotazioni impossibili o ambigue.
Formato dati:
Orientation: 155.43, -1.11, -4.43
Quaternioni
I quaternioni offrono un modo più robusto di rappresentare le orientazioni e le rotazioni 3D senza soffrire del problema del gimbal lock. Un quaternione è un numero complesso a quattro dimensioni che estende il concetto di rotazione in tre dimensioni. Consiste di una parte reale e tre parti immaginarie, tipicamente scritte come:
- Q = w + xi + yj + zk
Dove:
- w è la parte scalare (componente reale),
- x, y, z sono le parti vettoriali (componenti immaginarie).
I quaternioni sono particolarmente utili nelle applicazioni che coinvolgono grafica 3D, robotica e aerospazio perché offrono rotazioni fluide e continue e sono computazionalmente efficienti. A differenza degli angoli di Eulero, i quaternioni evitano i problemi del gimbal lock e possono interpolare le rotazioni in modo fluido (un processo noto come “slerp” o interpolazione lineare sferica).
In sintesi, mentre gli angoli di Eulero sono più facili da comprendere e visualizzare, i quaternioni forniscono un approccio più avanzato e versatile per gestire le rotazioni 3D, in particolare in applicazioni complesse o in cui le prestazioni sono critiche.
Formato dati:
Quaternion: 0.9766, -0.0357, -0.0181, 0.2111
Grazie
Il Visualizzatore di Modelli 3D è uno strumento essenziale per chiunque lavori con sensori a 9 DOF come il BNO055 e l’MPU9250. Fornendo la visualizzazione in tempo reale dei dati del sensore, ti aiuta a garantire che i tuoi sensori siano correttamente calibrati e traccino accuratamente i movimenti. Che tu stia testando esempi di una libreria di sensori o sviluppando le tue applicazioni, questo visualizzatore offre un modo semplice ma potente per interagire e comprendere i dati del tuo sensore.