
-
AuthorSearch Results
-
10 May 2022 at 10:45 #20757
In reply to: EByte LoRa e32: high sending and receiving latency
Yes, I always get this error.
Guru Meditation Error: Core 1 panic'ed (LoadProhibited). Exception was unhandled. Core 1 register dump: PC : 0x4000c2af PS : 0x00060730 A0 : 0x800d176c A1 : 0x3ffb1f20 A2 : 0x3ffb1f42 A3 : 0x00000000 A4 : 0x00000006 A5 : 0x3ffb1f42 A6 : 0x00000010 A7 : 0x00000000 A8 : 0x00000000 A9 : 0x00000000 A10 : 0x00000009 A11 : 0x00000003 A12 : 0x00000064 A13 : 0x00000457 A14 : 0x00000011 A15 : 0x00000008 SAR : 0x0000000a EXCCAUSE: 0x0000001c EXCVADDR: 0x00000000 LBEG : 0x00000000 LEND : 0x00000000 LCOUNT : 0x00000000 ELF file SHA256: 0000000000000000 Backtrace: 0x4000c2af:0x3ffb1f20 0x400d1769:0x3ffb1f30 0x400d1882:0x3ffb1f80 0x400d4912:0x3ffb1fb0 0x40086a75:0x3ffb1fd0here is my sketch. it was a long sketch I just make it simple so there is a lot of garbage variable
Lora 1
// software 2 khusus untuk hardware 2 untuk terhubung ke WiFi dan bot Telegram //*************************************************** //#define FREQUENCY_915 //define frekuensi #include <Arduino.h> #include <WiFi.h> #include <ESP32Ping.h> #include <CTBot.h> #include <LoRa_E32.h> #include <SPI.h> #include <Wire.h> #include <Adafruit_I2CDevice.h> #include <Adafruit_GFX.h> #include <Adafruit_SSD1306.h> #define FPM_SLEEP_MAX_TIME 0xFFFFFFF #define AUX 18 #define M0 19 #define M1 23 #define SCREEN_WIDTH 128 // OLED display width, in pixels #define SCREEN_HEIGHT 32 // OLED display height, in pixels #define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin) #define SCREEN_ADDRESS 0x3C ///< See datasheet for Address; 0x3D for 128×64, 0x3C for 128×32 Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); // Variabel global unsigned long lastSendTime = 0; unsigned long interval = 10000; String Data = ""; String JenisPesanLora = ""; // memulai serial untuk LoRa LoRa_E32 e32ttl100(16, 17, &Serial2, AUX, M0, M1, UART_BPS_RATE_9600, SERIAL_8N1); // RX ESP32,TX ESP32, mode Serial, Pin Aux, M0, M1 // memulai untuk dual core TaskHandle_t task0, task1; //************************************************************** // gunakan apabila diperlukan pemasangan wifi manual String wifiSSID = "Mi 10T Amien"; // nama wifi anda String wifiPassword = "123123456789"; // password wifi //************************************************************* TBMessage tMessage; String pingGoogle = "www.google.com"; String tokenBot = "5397733058:AAHD7UoshanXX-7TIEjPRT02iaCng6qUsso"; CTBot myBot; // Deklarasi Fungsi void callback(); void nodeConfig(); // konfigurasi LoRa void cekpesanLoRa(); // cek pesan LoRa void printParameters(struct Configuration configuration); void kirimpesanlora(); void setup() { // put your setup code here, to run once: Serial.begin(9600); delay(1000); // start LoRa e32ttl100.begin(); nodeConfig(); // konfigurasi LoRa // start masing masing task di core masing masing // task0 khusus untuk cek LoRa dan task1 untuk bot dan akses WiFi } // LOOP //******************************************************************************* void loop() { if (e32ttl100.available() <= 0) { if (millis() - lastSendTime > interval) { JenisPesanLora = "GPS"; lastSendTime = millis(); } else { JenisPesanLora = "STS"; } kirimpesanlora(); delay(1500); } cekpesanLoRa(); delay(2000); } //******************************************************************************* //****————————–Callback Lora————————–**** void callback() { Serial.println("Callback"); Serial.flush(); } //****————————–Konfigurasi LoRa————————–**** void nodeConfig() { ResponseStructContainer c; c = e32ttl100.getConfiguration(); Configuration configuration = *(Configuration *)c.data; configuration.ADDH = 0x0; configuration.ADDL = 0x3; configuration.CHAN = 0x2; configuration.SPED.airDataRate = AIR_DATA_RATE_010_24; configuration.SPED.uartBaudRate = UART_BPS_9600; configuration.SPED.uartParity = MODE_00_8N1; configuration.OPTION.fec = FEC_1_ON; configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION; configuration.OPTION.ioDriveMode = IO_D_MODE_PUSH_PULLS_PULL_UPS; configuration.OPTION.transmissionPower = POWER_20; configuration.OPTION.wirelessWakeupTime = WAKE_UP_1250; // Set configuration changed and set to not hold the configuration ResponseStatus rs = e32ttl100.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE); printParameters(configuration); Serial.print("Config: "); Serial.println(rs.getResponseDescription()); c.close(); } //****————————–Cek Pesan LoRa————————–**** void cekpesanLoRa() { if (e32ttl100.available() > 0) { Serial.println("———-"); ResponseContainer rc = e32ttl100.receiveMessageUntil(); // Kalau Error print errornya if (rc.status.code != 1) { rc.status.getResponseDescription(); } else { // Print data yang diterima Serial.println(rc.data); Data = rc.data; } } } //****————————–Cek parameter konfigurasi LoRa————————–**** void printParameters(struct Configuration configuration) { Serial.println("—————————————-"); Serial.print(F("HEAD : ")); Serial.print(configuration.HEAD, BIN); Serial.print(" "); Serial.print(configuration.HEAD, DEC); Serial.print(" "); Serial.println(configuration.HEAD, HEX); Serial.println(F(" ")); Serial.print(F("AddH : ")); Serial.println(configuration.ADDH, DEC); Serial.print(F("AddL : ")); Serial.println(configuration.ADDL, DEC); Serial.print(F("Chan : ")); Serial.print(configuration.CHAN, DEC); Serial.print(" -> "); Serial.println(configuration.getChannelDescription()); Serial.println(F(" ")); Serial.print(F("SpeedParityBit : ")); Serial.print(configuration.SPED.uartParity, BIN); Serial.print(" -> "); Serial.println(configuration.SPED.getUARTParityDescription()); Serial.print(F("SpeedUARTDatte : ")); Serial.print(configuration.SPED.uartBaudRate, BIN); Serial.print(" -> "); Serial.println(configuration.SPED.getUARTBaudRate()); Serial.print(F("SpeedAirDataRate : ")); Serial.print(configuration.SPED.airDataRate, BIN); Serial.print(" -> "); Serial.println(configuration.SPED.getAirDataRate()); Serial.print(F("OptionTrans : ")); Serial.print(configuration.OPTION.fixedTransmission, BIN); Serial.print(" -> "); Serial.println(configuration.OPTION.getFixedTransmissionDescription()); Serial.print(F("OptionPullup : ")); Serial.print(configuration.OPTION.ioDriveMode, BIN); Serial.print(" -> "); Serial.println(configuration.OPTION.getIODroveModeDescription()); Serial.print(F("OptionWakeup : ")); Serial.print(configuration.OPTION.wirelessWakeupTime, BIN); Serial.print(" -> "); Serial.println(configuration.OPTION.getWirelessWakeUPTimeDescription()); Serial.print(F("OptionFEC : ")); Serial.print(configuration.OPTION.fec, BIN); Serial.print(" -> "); Serial.println(configuration.OPTION.getFECDescription()); Serial.print(F("OptionPower : ")); Serial.print(configuration.OPTION.transmissionPower, BIN); Serial.print(" -> "); Serial.println(configuration.OPTION.getTransmissionPowerDescription()); Serial.println("—————————————-"); } void kirimpesanlora() { String Sampaikan = ""; if (JenisPesanLora == "STS") { Sampaikan += "STS\0"; } else if (JenisPesanLora == "GPS") { Sampaikan += "GPS\0"; } ResponseStatus rs = e32ttl100.sendFixedMessage(0x0, 0x1, 0x2, Sampaikan); Serial.println("Sending " + Sampaikan); Serial.println(rs.getResponseDescription()); }Lora 2
#include <Arduino.h> #include <TinyGPSPlus.h> //#define E32_TTL_100 //#define FREQUENCY_915 #include <LoRa_E32.h> #include <SPI.h> #include <Wire.h> #include <Adafruit_I2CDevice.h> #include <Adafruit_GFX.h> #include <Adafruit_SSD1306.h> #define AUX 18 #define M0 19 #define M1 23 #define RXPin 2 #define TXPin 4 #define TRIG_PIN_1 25 // ESP32 pin GIOP25 connected to Ultrasonic Sensor’s TRIG pin #define TRIG_PIN_2 26 // ESP32 pin GIOP26 TRIG pin #define TRIG_PIN_3 33 // ESP32 pin GIOP33 TRIG pin #define ECHO_PIN_1 34 // ESP32 pin GIOP34 connected to Ultrasonic Sensor’s ECHO pin #define ECHO_PIN_2 35 // ESP32 pin GIOP35 ECHO pin #define ECHO_PIN_3 36 // ESP32 pin GIOP36/VN ECHO pin static const uint32_t GPSBaud = 9600; // HardwareSerial serial1(2); LoRa_E32 e32ttl100(16, 17, &Serial2, AUX, M0, M1, UART_BPS_RATE_9600, SERIAL_8N1); HardwareSerial ss(1); // GPS hardware serial // memulai untuk dual core TaskHandle_t task0, task1; // Variable global int jeda_sensor = 5000; unsigned long millis_sekarang = 0; float duration_us_1, distance_cm_1; float duration_us_2, distance_cm_2; float duration_us_3, distance_cm_3; String Data = ""; String data_masuk; int interval = 5000; int interval2 = 32150; int interval3 = 5000; int interval4 = 5000; int interval5 = 5000; unsigned long lastSendTime = 0; unsigned long lastSendTime2 = 0; unsigned long lastSendTime3 = 0; unsigned long lastSendTime4 = 0; unsigned long lastSendTime5 = 0; bool islampuon = 0; bool issetrumon = 0; TinyGPSPlus gps; // memulai GPS NEO-6M // deklarasi fungsi void nodeConfig(); void Kirim_GPS_LoRa(); void Baca_Pesan_LoRa(); void setup() { // komunikasi serial Serial.begin(9600); delay(600); // configure the trigger pin to output mode pinMode(TRIG_PIN_1, OUTPUT); pinMode(TRIG_PIN_2, OUTPUT); pinMode(TRIG_PIN_3, OUTPUT); // configure the echo pin to input mode pinMode(ECHO_PIN_1, INPUT); pinMode(ECHO_PIN_2, INPUT); pinMode(ECHO_PIN_3, INPUT); // komunikasi LoRa e32ttl100.begin(); // memulai LoRa nodeConfig(); // konfigurasi LoRa } //*********************LOOP*********************** //*********************LOOP*********************** void loop() { Baca_Pesan_LoRa(); delay(100); } //*********************LOOP*********************** //*********************LOOP*********************** //*********************KONFIGURASI LoRa*********************** void nodeConfig() { ResponseStructContainer c; c = e32ttl100.getConfiguration(); Configuration configuration = *(Configuration *)c.data; configuration.ADDH = 0x0; configuration.ADDL = 0x1; configuration.CHAN = 0x2; configuration.SPED.airDataRate = AIR_DATA_RATE_010_24; configuration.SPED.uartBaudRate = UART_BPS_9600; configuration.SPED.uartParity = MODE_00_8N1; configuration.OPTION.fec = FEC_1_ON; configuration.OPTION.fixedTransmission = FT_FIXED_TRANSMISSION; configuration.OPTION.ioDriveMode = IO_D_MODE_PUSH_PULLS_PULL_UPS; configuration.OPTION.transmissionPower = POWER_20; configuration.OPTION.wirelessWakeupTime = WAKE_UP_1250; // Set configuration changed and set to not hold the configuration ResponseStatus rs = e32ttl100.setConfiguration(configuration, WRITE_CFG_PWR_DWN_SAVE); Serial.print("Config: "); Serial.println(rs.getResponseDescription()); } //*********************Lora Rutin*********************** void Kirim_GPS_LoRa() { String Sampaikan = ""; if (data_masuk == "STS") { Sampaikan += "Status\n"; Sampaikan += "LAman\n"; Sampaikan += "SAman\0"; } else if (data_masuk == "GPS") { Sampaikan += "Lokasi\n"; Sampaikan += "Aman\0"; } ResponseStatus rs = e32ttl100.sendFixedMessage(0x0, 0x3, 0x2, Sampaikan); Serial.println("Sending " + Sampaikan); Serial.println(rs.getResponseDescription()); } //*********************Baca pesan lora dari esp lain*********************** void Baca_Pesan_LoRa() { if (e32ttl100.available() > 0) { Serial.println("———-"); ResponseContainer rc = e32ttl100.receiveMessageUntil(); // Kalau Error print errornya if (rc.status.code != 1) { rc.status.getResponseDescription(); } else { // Print data yang diterima Serial.println(rc.data); Data = rc.data; data_masuk = Data; delay(1000); Kirim_GPS_LoRa(); } } }it is a bit mess. please help. im going out of my mind, this is my final college project
8 September 2020 at 07:31 #6158Hi Ricardo,
EByte E32 are suitable for your pourpuse.
I create a little project with WeMos D1 mini (esp8266) and LoRa E32 to control and fill water tank that have similar behaivor:
- a master with relay to activate pump, a simple oled display to show status an encoder to manage menù;
- a client that is powered by battery that are in sleep mode and have 2 water sensor level.
This devices communicate in this manner
- master send a wake message to a remote E32 that wake up;
- client check water level sensors;
- send current level to the master and go to sleep;
- master receive message and if te tank is not full start pump;
- when client is waked up by max level sensor send a new message to master with the new status and wait for ACK message;
- master receive message stop pump and send ACK.
To manage wake of an Arduino up you can refer to this article Ebyte LoRa E32 device for Arduino, esp32 or esp8266: WOR (wake on radio) microcontroller and new Arduino shield
For Raspberry I don’t have a library, and you have 2 way:
- implement base serial command in Raspberry and use a EByte USB TTLlike so (code is not functional example)
#!/usr/bin/env python import time import serial ser = serial.Serial( port='/dev/ttyS0', #Replace ttyS0 with ttyAM0 for Pi1,Pi2,Pi0 baudrate = 9600, parity=serial.PARITY_NONE, stopbits=serial.STOPBITS_ONE, bytesize=serial.EIGHTBITS, timeout=1 ) ser.write('') - but I’m going to release a REST server implemented in an esp8266 or esp32 that you can control via GET and POST in this way, and receive messages in realtime via WebSocket
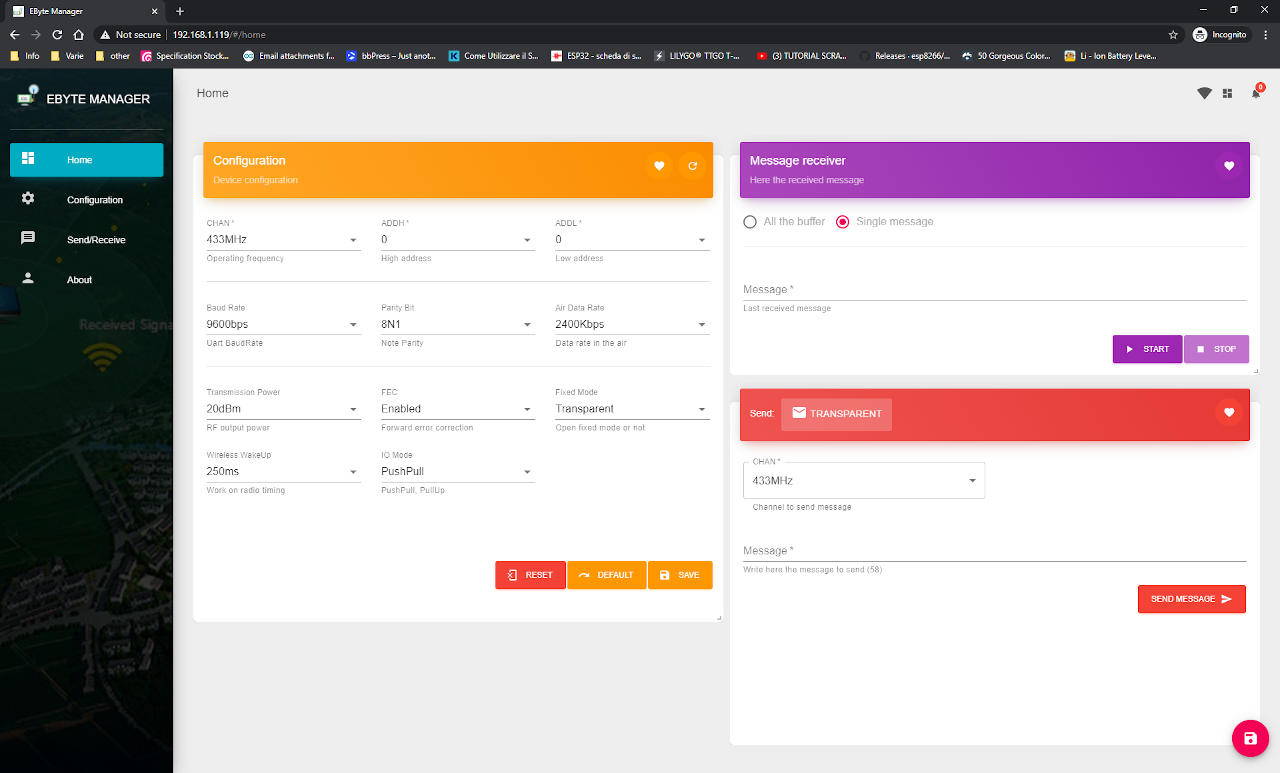
REST server on esp8266 and esp32: introduction
with this base I create this web interface
I think the second way simplify your work a lot, but you must have patience, because I need more time to publish that.
But I’m here if you need more information.
Bye Renzo
-
AuthorSearch Results

Support me!!
Support free knowledge!To keep this site free, I use affiliate links. If you buy through these links, I receive a small commission at no extra cost to you. It’s a simple way to support my work. Thank you!
Recent Topics
-
E32900T30D Only Transmitting on 866MHz
by
 1 week, 2 days ago
1 week, 2 days ago -
Rapsberry Pico 2 W & SimpleFTPServer
by
 2 weeks ago
2 weeks ago -
STM32MP151CAA3
by
 2 weeks, 6 days ago
2 weeks, 6 days ago -
Feasibility of using EmailSender (SSL/TLS) on Raspberry Pi Pico (RP2040) + W5500
by 3 weeks, 2 days ago
-
ciclop 3d scanner
by
 1 month ago
1 month ago





-
Renzo Mischianti says:Hi Dario, Thanks for the feedback, I will double-check the compatibility...
-

-
-
 samlevy0515 says:
samlevy0515 says: -
Renzo Mischianti says:
Maintaining a repository (or site or forum) is a lot like tending to a garden - it requires constant care and attention to keep it thriving. If you're a skilled gardener (or coder!) and want to help keep our repository blooming, we'd love to have you on board! We're also looking for talented writers and forum moderators to help us grow our community. Interested in joining our team? Don't hesitate to reach out and let us know how you can contribute!

Useful PCBs
All content is


The content displayed on this website is protected under a CC BY-NC-ND license. Visitors are prohibited from using, redistributing, or altering any content from this website for commercial purposes, including generating revenue through advertising. Any unauthorized use is a violation of the license terms and legal action may be taken against individuals or entities found to be in violation.
You must also provide the link to the source.
